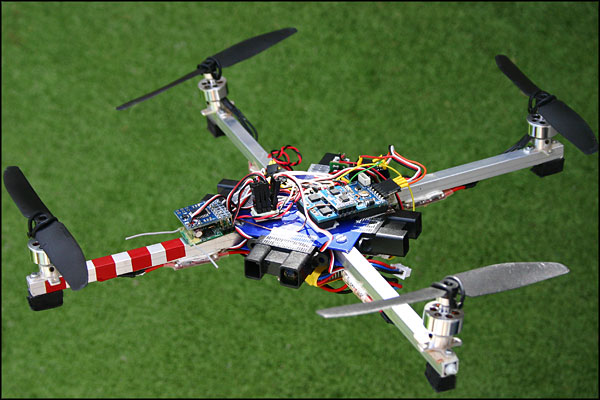
ArduIMU — это реализованный на базе Arduino блок инерциальных датчиков (Inertial measurement Unit) для коптера (спасибо vlady за уточнение). Этот вертолёт имеет на борту 4 инфракрасных датчика и один ультразвуковой, благодаря чему он может автоматически обходить препятствия.
Квадрокоптер использует ArduIMU в качестве гироплатформы и мозгов для стабилизации.
Журнал проекта.
