В этой статье я хотел бы рассказать вам о нашем проекте.
Проект посвящен созданию действующей трехмерной компьютерной модели нематоды C. Elegans, то есть модель, включающую сенсорную, нервную и мышечную системы, взаимодействующие между собой и рассматриваемые в физическом окружении. Фундаментальная проблема, на решение которой направлен проект — выяснить, возможно ли на основе современных моделей биологического нейрона воспроизвести поведение виртуального организма, близкое к оригиналу. Модельным организмом, как уже было сказано выше, был взят C.Elegans (свободно живущая нематода). Наш выбор пал именно на этой нематоде, не просто так, C. Elegans — наиболее изученный многоклеточный организм, на сегодняшний день есть данные не только обо всех нейронах, но и о связях между ними (302 нейрона, более 5000 синапсов, более 2000 нейромышечных соединений и 95 мышечных клеток, осуществляющих движение, весь организм состоит из 959 клеток). В этой связи нематода C. Elegans представляется не просто одним из возможных объектов исследования, а ключом к проблеме интеллекта, поскольку обладает рядом уникальных свойств – инвариантностью строения нервной системы, упрощающей задачу наблюдения за состояниями нейронов в живом организме, предельно высокая изученность строения на сегодняшний день, и достаточно сложный спектр поведенческих реакций при относительной простоте нервной системы. Создание полнофункциональной виртуальной копии C. Elegans позволит заложить фундамент для изучения нервной системы значительно более сложных существ, а также существенно расширить возможности проектирования искусственных нейронных сетей, используя выявленные механизмы и паттерны, присущие биологическим нейронным сетям, что представляет исключительный интерес как для нейробиологии, так и для областей знаний, связанных и искусственным интеллектом.
На данный момент достигнуты следующие результаты. Сделан симулятор мышечной системы и окружения, в котором модель функционирует. В его основе лежит физическая модель, построенная в виде системы связанных точечных масс и пружин; последние могут сокращаться под действием посылаемых им сигналов нервных импульсов от моторных нейронов пропорционально интенсивности сигнала. Система дифференциальных уравнений, описывающая модель, численно решается на каждом шаге, учитывая гравитацию, трение, реакцию опоры от поверхности и т.д. В модели используются экспериментальные данные о координатах нейронов и связях между ними; координаты нейронов динамически связаны с пружинно-мышечным каркасом C. Elegans. В рамках этой модели мы можем регистрировать для каждой точки момент касания поверхности и посылать сигнал соответствующим клеткам-детекторам тактильных ощущений, а в случае активации моторных нейронов сокращать те или иные мышцы. На данный момент сделана нейронная сеть мотонейронов (моторный контур), которые управляют поведением мышечной системы организма, эта нейронная сеть станет подсетью большей сети, охватывающей все нейроны C. Elegans. На данный момент мы реализуем нейронную сеть, полностью повторяющую нейронную сеть живого червя.
Все модель реализуется на С++. Визуализация осуществляется при помощи OpenGl.
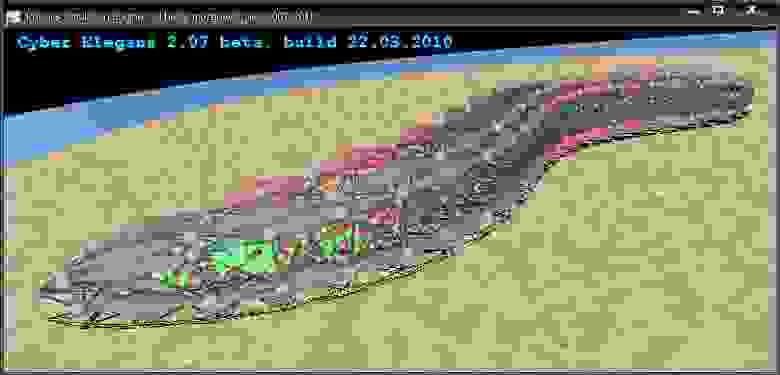
Разноцветными надписями помечены названия нейронов
На рисунке разноцветными сферами представлены нейроны.
Проект реализуется в Лаборатория моделирования сложных систем, института систем информатики имени А. П. Ершова СО РАН. Проект выполняется командой из трех человек, Андрея Юрьевича Пальянова, непосредственного руководителя проекта и по совместительству моего научного руководителя, мной и Александром Дибертом.
ЗАДАЧА
Проект посвящен созданию действующей трехмерной компьютерной модели нематоды C. Elegans, то есть модель, включающую сенсорную, нервную и мышечную системы, взаимодействующие между собой и рассматриваемые в физическом окружении. Фундаментальная проблема, на решение которой направлен проект — выяснить, возможно ли на основе современных моделей биологического нейрона воспроизвести поведение виртуального организма, близкое к оригиналу. Модельным организмом, как уже было сказано выше, был взят C.Elegans (свободно живущая нематода). Наш выбор пал именно на этой нематоде, не просто так, C. Elegans — наиболее изученный многоклеточный организм, на сегодняшний день есть данные не только обо всех нейронах, но и о связях между ними (302 нейрона, более 5000 синапсов, более 2000 нейромышечных соединений и 95 мышечных клеток, осуществляющих движение, весь организм состоит из 959 клеток). В этой связи нематода C. Elegans представляется не просто одним из возможных объектов исследования, а ключом к проблеме интеллекта, поскольку обладает рядом уникальных свойств – инвариантностью строения нервной системы, упрощающей задачу наблюдения за состояниями нейронов в живом организме, предельно высокая изученность строения на сегодняшний день, и достаточно сложный спектр поведенческих реакций при относительной простоте нервной системы. Создание полнофункциональной виртуальной копии C. Elegans позволит заложить фундамент для изучения нервной системы значительно более сложных существ, а также существенно расширить возможности проектирования искусственных нейронных сетей, используя выявленные механизмы и паттерны, присущие биологическим нейронным сетям, что представляет исключительный интерес как для нейробиологии, так и для областей знаний, связанных и искусственным интеллектом.
ЧТО СДЕЛАНО
На данный момент достигнуты следующие результаты. Сделан симулятор мышечной системы и окружения, в котором модель функционирует. В его основе лежит физическая модель, построенная в виде системы связанных точечных масс и пружин; последние могут сокращаться под действием посылаемых им сигналов нервных импульсов от моторных нейронов пропорционально интенсивности сигнала. Система дифференциальных уравнений, описывающая модель, численно решается на каждом шаге, учитывая гравитацию, трение, реакцию опоры от поверхности и т.д. В модели используются экспериментальные данные о координатах нейронов и связях между ними; координаты нейронов динамически связаны с пружинно-мышечным каркасом C. Elegans. В рамках этой модели мы можем регистрировать для каждой точки момент касания поверхности и посылать сигнал соответствующим клеткам-детекторам тактильных ощущений, а в случае активации моторных нейронов сокращать те или иные мышцы. На данный момент сделана нейронная сеть мотонейронов (моторный контур), которые управляют поведением мышечной системы организма, эта нейронная сеть станет подсетью большей сети, охватывающей все нейроны C. Elegans. На данный момент мы реализуем нейронную сеть, полностью повторяющую нейронную сеть живого червя.
Все модель реализуется на С++. Визуализация осуществляется при помощи OpenGl.
Разноцветными надписями помечены названия нейронов
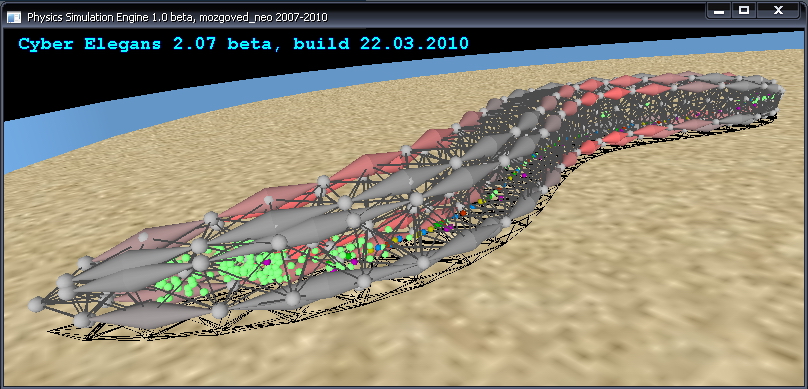
На рисунке разноцветными сферами представлены нейроны.
Проект реализуется в Лаборатория моделирования сложных систем, института систем информатики имени А. П. Ершова СО РАН. Проект выполняется командой из трех человек, Андрея Юрьевича Пальянова, непосредственного руководителя проекта и по совместительству моего научного руководителя, мной и Александром Дибертом.
