Тема электротранспорта уже перестала быть новой для IT-сообщества. Хотя электромобиль на российских дорогах увидеть пока в диковинку, но некоторые хабралюди уже собирают электровелосипеды своими руками. Этот репортаж об электромобилях, но главная изюминка вовсе не в этом. Дело в том, что итальянская фирма VisLab некоторое время назад начала воплощать в жизнь грандиозное мероприятие — трансконтинентальный автопробег на автоматически управляемых электромобилях, способных передвигаться почти без участия человека и совсем без использования традиционного топлива. С 17 по 19 августа итальянская делегация находилась в Москве, 18 августа проводилась демонстрация рядом с гостиницей «Космос», а вчера, 19 августа — демонстрация для московского представительства фирмы Topcon Positioning Systems, которая является партнёром пробега и поставляла для него своё навигационное оборудование. На эту демонстрацию мне и посчастливилось попасть. Прежде всего хочу разочаровать смотревших фильм «Я, робот» и польстившихся на картинку выше. Никаких сверхскоростных суперкаров без руля, всё много скромнее. Обычные итальянские «микровагончики» с электроприводом Piaggio Porter, обклеенные лейблами и обвязанные проводами. Забегая вперёд — полностью автоматического управления в VisLab тоже пока не добились. Но всё же автомобили очень интересны и VisLab было что показать.
Прежде всего хочу разочаровать смотревших фильм «Я, робот» и польстившихся на картинку выше. Никаких сверхскоростных суперкаров без руля, всё много скромнее. Обычные итальянские «микровагончики» с электроприводом Piaggio Porter, обклеенные лейблами и обвязанные проводами. Забегая вперёд — полностью автоматического управления в VisLab тоже пока не добились. Но всё же автомобили очень интересны и VisLab было что показать.

Красавцы, правда?

Вид спереди, «вагончик» обвешан датчиками и оборудованием. Ниже описание всего, что установлено дополнительно снаружи и внутри.

На крыше спереди, над лобовым стеклом, помещаются передние камеры, формирующие стереоскопическое изображение(справа и слева), стереобаза примерно 80 см. По стереоскопическому изображению отслеживаются дорожные неровности, дорожная разметка и возможный уклон, при движении по хорошим дорогам. По центру, между камерами, с наклоном вниз, находится внедорожный лазерный сканер, на него автоматика полагается при езде подорогам российским местам, где дорог нет. Он выполняет сходную со стереокамерами задачу, но более ориентирован на поиск неровностей. Также под стеклом можно увидеть систему получения панорамного изображения — три камеры, картинка с которых «склеивается» воедино в компьютере, получается вид спереди с полем зрения 180 градусов по горизонтали. По этой картинке отслеживается положение «ведущей» машины, даже если впереди уклон или резкий поворот.

На переднем бампере установлены еще три лазерных сканера. Из них:

Почти всю крышу занимает солнечная батарея, от которой питается вся система автоматического управления. Она никак не связана со стандартными аккумуляторами и электродвигателем. Сделано именно так, поскольку в VisLab хотели внести минимальные изменения в стандартные системы электромобиля. Для плохой погоды и ночной езды у системы управления имеются свои резервные аккумуляторы. Еще из интересного на крыше:

Жутко полезное устройство с эмблемой Topcon Positioning Systems, включает в себя:

Устройство в коричневом корпусе без надписей было установлено только на одной из машин, по некоторым данным это навигационная система фирмы Thales, похожая по функционалу на вышеописанную Topcon.Подробностей, к сожалению, нет.UPD: Подробности появились, это не навигационная, а телекоммуникационная система, точней, её антенна. В багажнике под полкой находится её блок управления(есть на общем виде багажника ниже).

Это одна из задних стереокамер и «коробочка с антенной», описание которой отсуствует на сайте VisLab, по-видимому это еще один радиомодем. Функционал задних стереокамер примерно такой же, как у передних лазерных сканеров — обнаружение препятствий. Прозрачный ящичек на заднем плане — коммутационный блок с разъемами, закрытыми от дождя пластиковым корпусом.

Вид машины сбоку. Видно, сколько организаций приложило к руку к проекту. Также можно заметить две розетки. Одну стандартную, через нее происходит заряд аккумуляторов, питающих двигатель:

И одну, поставленную VisLab, эта розетка используется для питания «автоматического водителя» при настройке и отладке системы:

Рядом с розеткой виден разъём RJ-45 — это обычный порт Gigabit Ethernet, который может использоваться для высокоскоростного подключения бортовой компьютерной сети к «внешнему миру».
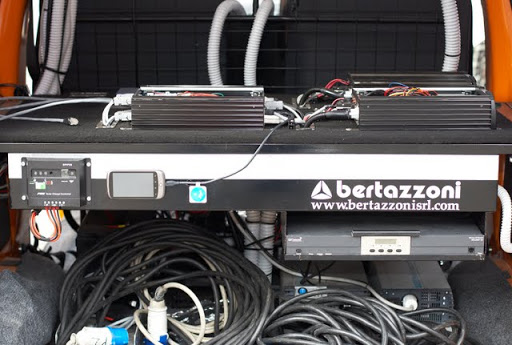
Ну и, наверное, самое интересное для хабралюдей — «мозги» системы:

Схема бортовой сети, из которой видно, что «мозгов» у системы три — это три CarPC, каждый из которых занимается своей задачей. По конфигурации компьютеров данных немного, из того, что видно на фото — используются 64-гигабайтные SSD Kingston. SSD — лучший вариант для CarPC, не только из-за скорости, но и из-за нечувствительности к вибрациям. Из того, что на фото не видно, но мне удалось посмотреть — на материнских платах стоят процессорные разъемы Socket 478. Радиаторы там довольно скромные, так что я затрудняюсь сказать, какие именно процессоры используются в этих компьютерах. Очевидно, не Intel Atom, возможно, C7 фирмы VIA Technologies.

Первый PC, «brown1», занимается прокладкой курса и непосредственно управлением автомобилем. К нему подключена система «X-BY-WIRE», она же Drive-by-Wire, т.е. собственно система управления автомобилем при помощи сервомоторов, по проводам. Также, к изрядному количеству COM-портов подключены навигационные приемники, системы инерционных сенсоров и прочее оборудование Topcon и Thales.

Второй PC, «brown2», ответственен за «склейку» панорамного изображения с трех камер на лобовом стекле и его обработку, а также за обнаружение препятствий при помощи передних лазерных сканеров на бампере. К этому компьютеру подключены по IEEE1394 видеокамеры, сканеры же включены в общую бортовую сеть Ethernet.
Третий PC, «brown3», работает над отслеживанием состояния дороги при помощи четвертого сканера(того, что на крыше) и четырёх камер — двух передних, дающих стереоизображение того, что находится перед автомобилем и двух задних, дающих аналогичное изображение того, что творится сзади. Также, по заднему стереоизображению происходит обнаружение препятствий сзади. К этому компьютеру непосредственно подключены 4 камеры с крыши, опять же по Firewire.

Контроллер заряда резервного аккумулятора от солнечных батарей. Сам аккумулятор, по-видимому, находится в ящике, на котором установлены все компьютеры.

Рядом с контроллером с какой-то целью был прикреплен коммуникатор без опознавательных надписей, подключенный к brown1. Судя по клавишам — с ОС Android внутри. Как подсказали в комментариях — это Nexus One. Назначение так и осталось для меня загадкой — за всё время демонстрации итальянцы его ни разу не включили. Спасибо хабраюзеру SovGVD, назначение коммуникатора тоже выяснили — это система IBM для сбора информации о концентрации углекислого газа, о ней написано чуть ниже.

Сканеры и компьютеры связаны между собой гигабитной сетью, так что это обычные гигабитные свитчи, возможно даже у кого-то из читающих на работе или дома стоят такие же.

Общий вид с открытым багажником, согреет сердце любого сисадмина. Под полкой справа можно разглядеть блок управления телекоммуникационной системой Thales.
Конечно, интересно посмотреть на автомобили в движении. К сожалению, у меня не было качественной видеокамеры, только мой коммуникатор. Поэтому сначала описание, потом фото, а потом уже скромное короткое видео.
Итак, детали пробега: всего машинок 4, из них две основные и две резервные. На демонстрации присутствовали только три, одну итальянцы куда-то подевали. Непосредственно демонстрировались опять же два «микровагончика». Вдобавок, за пробегом должна следовать целая вереница трейлеров, на случай настройки систем, ремонта, непредвиденных ситуаций, и.т.д. Но трейлеры на демонстрацию не приехали, так что сказать мне об этом особо нечего.
На всех электромобилях установлено одинаковое оборудование(за исключением телекоммуникационной системы — той что в коричневом корпусе, она присутствует в единственном экземпляре на ведущей машине).
Как я уже сказал, роли у двух машин разные: первая, «ведущая», передвигается автоматически большую часть пути, но в некоторых случаях в управление приходится вмешиваться человеку, т.к. иногда попадаются отклонения от намеченного курса и случаются различные непредвиденные ситуации. Также, первая машина собирает данные в течение всего путешествия, и на ней же проводятся различные эксперименты со сканерами и камерами, системой принятия решений и системами управления. Как добавил braindamaged, по всему маршруту машинка замеряет уровень CO2 и постит его в Твиттер
Вторая же, «ведомая» машина управляется компьютером 100% времени, человек никогда не вмешивается в управление. Система постоянно дорабатывается, исправляются баги и, как утверждает VisLab, такая машина после пробега сможет передвигаться по нечетко заданному маршруту полностью автоматически. Созданные по такому прообразу электромобили можно будет использовать для перевозок в условиях городского центра с его оживленным движением.
Едут машинки из Милана в Шанхай, значительная часть пробега проходит по территории России. На сайте имеется расписание основных остановок по датам, 22-го августа машинки должны быть в НиНо, а после будет еще много остановок в российских городах, от Саратова аж до Кемерова.
Ну а теперь немного фотографий в движении:

Обе машины, ведущая и ведомая. Ведущая в этот момент управляется в ручном режиме, ведомая, как обычно — автоматически.

Ведущая машина покрупнее.

Ведомая, в автоматическом режиме.


«Гляди как я умею!»
Видео на Youtube, обе машины в автоматическом режиме:
В заключение хочу выразить благодарность VisLab, которые сотворили этот кусочек будущего(хотя они подобное творят аж с 90-х годов прошлого века) и моему другу, пожелавшему остаться неизвестным, который позвал и провёл меня на мероприятие.
Если у кого-то есть вопросы — пишите в комментарии, попробую ответить. Кроме этого, на сайте пробега и сайте VisLab(ссылки в начале статьи) много информации на английском. Из самого интересного на сайте — возможность наблюдать картинку с камер ведущей машины в реальном времени. Правда вещание, к сожалению, регулярно отваливается из-за технических проблем, но порой всё же работает.
UPD: Оказалось, материал на эту тему на хабре уже был, но очень короткий и без подробностей. Еще был один репортаж об авто в движении, там есть интересное видео.
 Прежде всего хочу разочаровать смотревших фильм «Я, робот» и польстившихся на картинку выше. Никаких сверхскоростных суперкаров без руля, всё много скромнее. Обычные итальянские «микровагончики» с электроприводом Piaggio Porter, обклеенные лейблами и обвязанные проводами. Забегая вперёд — полностью автоматического управления в VisLab тоже пока не добились. Но всё же автомобили очень интересны и VisLab было что показать.
Прежде всего хочу разочаровать смотревших фильм «Я, робот» и польстившихся на картинку выше. Никаких сверхскоростных суперкаров без руля, всё много скромнее. Обычные итальянские «микровагончики» с электроприводом Piaggio Porter, обклеенные лейблами и обвязанные проводами. Забегая вперёд — полностью автоматического управления в VisLab тоже пока не добились. Но всё же автомобили очень интересны и VisLab было что показать.
Красавцы, правда?

Вид спереди, «вагончик» обвешан датчиками и оборудованием. Ниже описание всего, что установлено дополнительно снаружи и внутри.

На крыше спереди, над лобовым стеклом, помещаются передние камеры, формирующие стереоскопическое изображение(справа и слева), стереобаза примерно 80 см. По стереоскопическому изображению отслеживаются дорожные неровности, дорожная разметка и возможный уклон, при движении по хорошим дорогам. По центру, между камерами, с наклоном вниз, находится внедорожный лазерный сканер, на него автоматика полагается при езде по

На переднем бампере установлены еще три лазерных сканера. Из них:
- 2 боковых, работающих в одной плоскости — параллельно земле, с полем зрения ~240 градусов(из-за установки в бампер, реально конструктивное поле зрения — 270 градусов).
- Центральный, работающий в 4 плоскостях, с полем зрения около 100 градусов.

Почти всю крышу занимает солнечная батарея, от которой питается вся система автоматического управления. Она никак не связана со стандартными аккумуляторами и электродвигателем. Сделано именно так, поскольку в VisLab хотели внести минимальные изменения в стандартные системы электромобиля. Для плохой погоды и ночной езды у системы управления имеются свои резервные аккумуляторы. Еще из интересного на крыше:

Жутко полезное устройство с эмблемой Topcon Positioning Systems, включает в себя:
- Трехсистемный(GPS, ГЛОНАСС, Galileo, частоты ГЛОНАСС: L1, L2, GPS: L1, L2, L5) навигационный приемник для навигации под открытым небом.
- Набор инерционных сенсоров для навигации в отсутствие данных от приёмника.
- Радиомодем
- Возможно что-то еще, устройство расширяется подключаемыми модулями.

Устройство в коричневом корпусе без надписей было установлено только на одной из машин, по некоторым данным это навигационная система фирмы Thales, похожая по функционалу на вышеописанную Topcon.

Это одна из задних стереокамер и «коробочка с антенной», описание которой отсуствует на сайте VisLab, по-видимому это еще один радиомодем. Функционал задних стереокамер примерно такой же, как у передних лазерных сканеров — обнаружение препятствий. Прозрачный ящичек на заднем плане — коммутационный блок с разъемами, закрытыми от дождя пластиковым корпусом.

Вид машины сбоку. Видно, сколько организаций приложило к руку к проекту. Также можно заметить две розетки. Одну стандартную, через нее происходит заряд аккумуляторов, питающих двигатель:

И одну, поставленную VisLab, эта розетка используется для питания «автоматического водителя» при настройке и отладке системы:

Рядом с розеткой виден разъём RJ-45 — это обычный порт Gigabit Ethernet, который может использоваться для высокоскоростного подключения бортовой компьютерной сети к «внешнему миру».
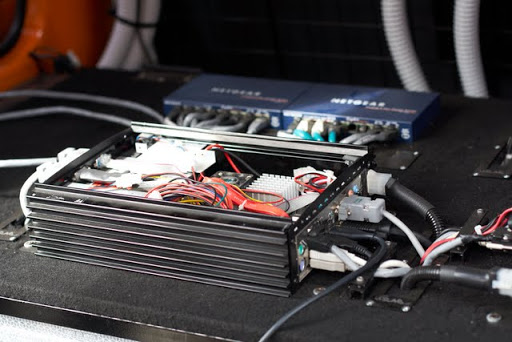
Ну и, наверное, самое интересное для хабралюдей — «мозги» системы:

Схема бортовой сети, из которой видно, что «мозгов» у системы три — это три CarPC, каждый из которых занимается своей задачей. По конфигурации компьютеров данных немного, из того, что видно на фото — используются 64-гигабайтные SSD Kingston. SSD — лучший вариант для CarPC, не только из-за скорости, но и из-за нечувствительности к вибрациям. Из того, что на фото не видно, но мне удалось посмотреть — на материнских платах стоят процессорные разъемы Socket 478. Радиаторы там довольно скромные, так что я затрудняюсь сказать, какие именно процессоры используются в этих компьютерах. Очевидно, не Intel Atom, возможно, C7 фирмы VIA Technologies.
Первый PC, «brown1», занимается прокладкой курса и непосредственно управлением автомобилем. К нему подключена система «X-BY-WIRE», она же Drive-by-Wire, т.е. собственно система управления автомобилем при помощи сервомоторов, по проводам. Также, к изрядному количеству COM-портов подключены навигационные приемники, системы инерционных сенсоров и прочее оборудование Topcon и Thales.

Второй PC, «brown2», ответственен за «склейку» панорамного изображения с трех камер на лобовом стекле и его обработку, а также за обнаружение препятствий при помощи передних лазерных сканеров на бампере. К этому компьютеру подключены по IEEE1394 видеокамеры, сканеры же включены в общую бортовую сеть Ethernet.
Третий PC, «brown3», работает над отслеживанием состояния дороги при помощи четвертого сканера(того, что на крыше) и четырёх камер — двух передних, дающих стереоизображение того, что находится перед автомобилем и двух задних, дающих аналогичное изображение того, что творится сзади. Также, по заднему стереоизображению происходит обнаружение препятствий сзади. К этому компьютеру непосредственно подключены 4 камеры с крыши, опять же по Firewire.

Контроллер заряда резервного аккумулятора от солнечных батарей. Сам аккумулятор, по-видимому, находится в ящике, на котором установлены все компьютеры.

Рядом с контроллером с какой-то целью был прикреплен коммуникатор без опознавательных надписей, подключенный к brown1. Судя по клавишам — с ОС Android внутри. Как подсказали в комментариях — это Nexus One. Назначение так и осталось для меня загадкой — за всё время демонстрации итальянцы его ни разу не включили. Спасибо хабраюзеру SovGVD, назначение коммуникатора тоже выяснили — это система IBM для сбора информации о концентрации углекислого газа, о ней написано чуть ниже.

Сканеры и компьютеры связаны между собой гигабитной сетью, так что это обычные гигабитные свитчи, возможно даже у кого-то из читающих на работе или дома стоят такие же.
Общий вид с открытым багажником, согреет сердце любого сисадмина. Под полкой справа можно разглядеть блок управления телекоммуникационной системой Thales.
Конечно, интересно посмотреть на автомобили в движении. К сожалению, у меня не было качественной видеокамеры, только мой коммуникатор. Поэтому сначала описание, потом фото, а потом уже скромное короткое видео.
Итак, детали пробега: всего машинок 4, из них две основные и две резервные. На демонстрации присутствовали только три, одну итальянцы куда-то подевали. Непосредственно демонстрировались опять же два «микровагончика». Вдобавок, за пробегом должна следовать целая вереница трейлеров, на случай настройки систем, ремонта, непредвиденных ситуаций, и.т.д. Но трейлеры на демонстрацию не приехали, так что сказать мне об этом особо нечего.
На всех электромобилях установлено одинаковое оборудование(за исключением телекоммуникационной системы — той что в коричневом корпусе, она присутствует в единственном экземпляре на ведущей машине).
Как я уже сказал, роли у двух машин разные: первая, «ведущая», передвигается автоматически большую часть пути, но в некоторых случаях в управление приходится вмешиваться человеку, т.к. иногда попадаются отклонения от намеченного курса и случаются различные непредвиденные ситуации. Также, первая машина собирает данные в течение всего путешествия, и на ней же проводятся различные эксперименты со сканерами и камерами, системой принятия решений и системами управления. Как добавил braindamaged, по всему маршруту машинка замеряет уровень CO2 и постит его в Твиттер
Вторая же, «ведомая» машина управляется компьютером 100% времени, человек никогда не вмешивается в управление. Система постоянно дорабатывается, исправляются баги и, как утверждает VisLab, такая машина после пробега сможет передвигаться по нечетко заданному маршруту полностью автоматически. Созданные по такому прообразу электромобили можно будет использовать для перевозок в условиях городского центра с его оживленным движением.
Едут машинки из Милана в Шанхай, значительная часть пробега проходит по территории России. На сайте имеется расписание основных остановок по датам, 22-го августа машинки должны быть в НиНо, а после будет еще много остановок в российских городах, от Саратова аж до Кемерова.
Ну а теперь немного фотографий в движении:

Обе машины, ведущая и ведомая. Ведущая в этот момент управляется в ручном режиме, ведомая, как обычно — автоматически.

Ведущая машина покрупнее.

Ведомая, в автоматическом режиме.


«Гляди как я умею!»
Видео на Youtube, обе машины в автоматическом режиме:
В заключение хочу выразить благодарность VisLab, которые сотворили этот кусочек будущего(хотя они подобное творят аж с 90-х годов прошлого века) и моему другу, пожелавшему остаться неизвестным, который позвал и провёл меня на мероприятие.
Если у кого-то есть вопросы — пишите в комментарии, попробую ответить. Кроме этого, на сайте пробега и сайте VisLab(ссылки в начале статьи) много информации на английском. Из самого интересного на сайте — возможность наблюдать картинку с камер ведущей машины в реальном времени. Правда вещание, к сожалению, регулярно отваливается из-за технических проблем, но порой всё же работает.
UPD: Оказалось, материал на эту тему на хабре уже был, но очень короткий и без подробностей. Еще был один репортаж об авто в движении, там есть интересное видео.
