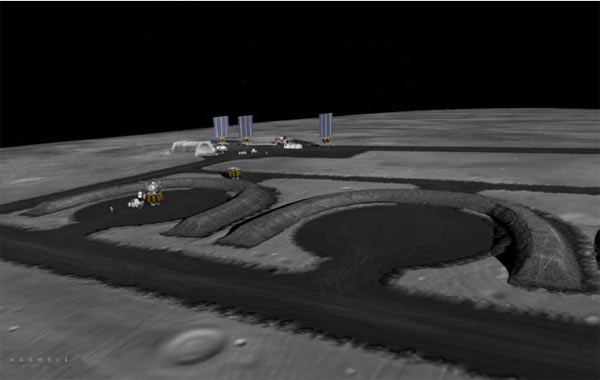
По плану НАСА, лунная база, пригодная для поселения людей, должна открыться уже в 2020 году. Но для начала её строительства нужно подготовить космодром для посадки и запуска ракет. Очевидно, это сделают роботы.
По заказу НАСА компания Astrobotic Technology совместно со специалистами из Института роботехники при университете Карнеги-Меллона провели исследование (PDF), какие именно роботы нужны для строительства.

Публикуем ключевые фрагменты из этого доклада.
На первом этапе требуется выровнять реголит (лунный грунт) под посадочные площадки и дороги, очистить территорию от фрагментов метеоритов и прочего мусора, прокопать траншеи под кабели и другую инфраструктуру, соорудить защитные насыпи и закрепить ландшафт.
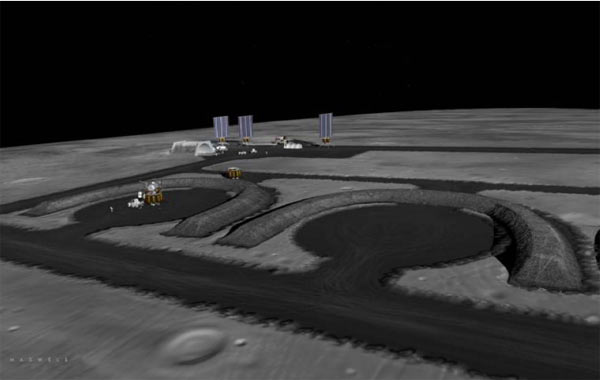
Защитные насыпи необходимы для того, чтобы защитить окружающий реголит и сооружения от плавления, неизбежный в процессе многочисленных посадок и запусков ракет.
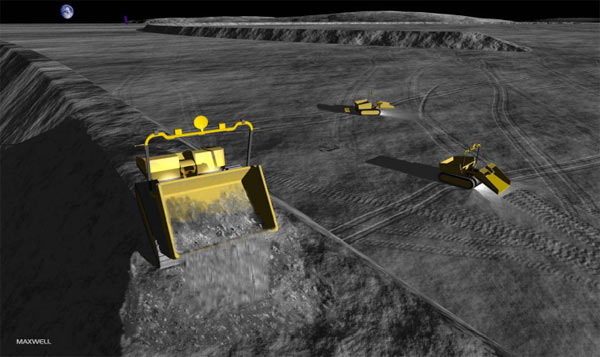
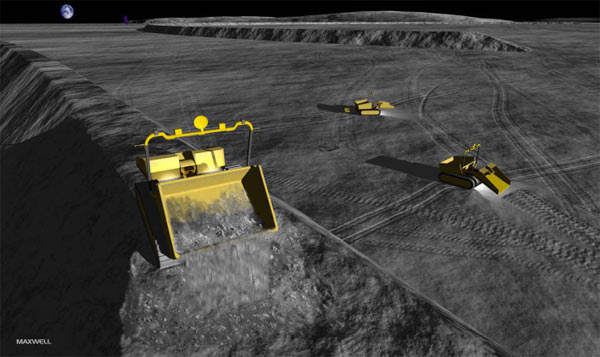
Сейчас учёные выясняют, насколько мощными будут экскаваторы и бульдозеры массой не более 300 кг в условиях лунной гравитации, как быстро они смогут работать. По предварительным оценкам, они смогут соорудить защитные насыпи в течение шести месяцев.
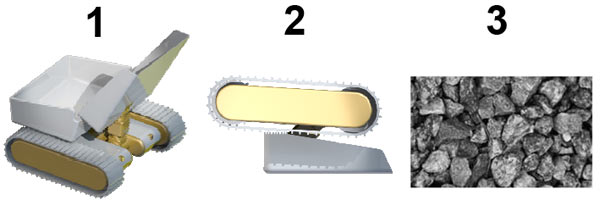
Для эффективного перемещения реголита планируется применить несколько взаимодополняющих технологий: 1) кузова на экскаваторах увеличат грузоподъёмность роботов; 2) вибрация под давлением для более плотной утрамбовки материала; 3) мощение камнями, собранными на местном грунте.
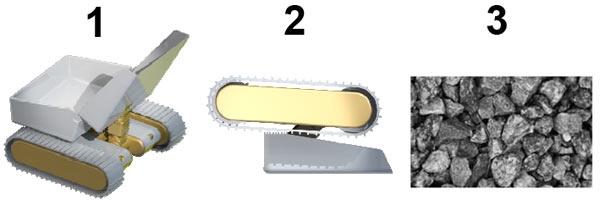
Соответственно, для утрамбовки и мощения роботов оборудуют специальными приспособлениями. Для эффективной конструкции робота учёным нужны дополнительные сведения о размере и количестве камней на поверхности Луны.
Алгоритм перемещения роботов для наибольшей эффективности будет такой (с циклами отлучения на подзарядку).
Согласно расчётам, два экскаватора с кузовами, каждый массой 150 кг, могут построить насыпь за 152 дня (5 месяцев) при средней загрузки кузова в 30%, скорости перемещения 15 см/с и при оценке, что надо переместить 1200 тонн реголита.
Три четверти всего времени экскаваторы будут проводить в дороге, так что скорость и точность их перемещения — это ключевой показатель. Предполагается, что у них не будет полноценной собственной системы навигации. Всё управление будет осуществляться операторами с Земли в реальном режиме времени, а также в частично автономном режиме под наблюдением операторов.
По заказу НАСА компания Astrobotic Technology совместно со специалистами из Института роботехники при университете Карнеги-Меллона провели исследование (PDF), какие именно роботы нужны для строительства.

Публикуем ключевые фрагменты из этого доклада.
На первом этапе требуется выровнять реголит (лунный грунт) под посадочные площадки и дороги, очистить территорию от фрагментов метеоритов и прочего мусора, прокопать траншеи под кабели и другую инфраструктуру, соорудить защитные насыпи и закрепить ландшафт.
Защитные насыпи необходимы для того, чтобы защитить окружающий реголит и сооружения от плавления, неизбежный в процессе многочисленных посадок и запусков ракет.
Сейчас учёные выясняют, насколько мощными будут экскаваторы и бульдозеры массой не более 300 кг в условиях лунной гравитации, как быстро они смогут работать. По предварительным оценкам, они смогут соорудить защитные насыпи в течение шести месяцев.
Для эффективного перемещения реголита планируется применить несколько взаимодополняющих технологий: 1) кузова на экскаваторах увеличат грузоподъёмность роботов; 2) вибрация под давлением для более плотной утрамбовки материала; 3) мощение камнями, собранными на местном грунте.
Соответственно, для утрамбовки и мощения роботов оборудуют специальными приспособлениями. Для эффективной конструкции робота учёным нужны дополнительные сведения о размере и количестве камней на поверхности Луны.
Алгоритм перемещения роботов для наибольшей эффективности будет такой (с циклами отлучения на подзарядку).
Согласно расчётам, два экскаватора с кузовами, каждый массой 150 кг, могут построить насыпь за 152 дня (5 месяцев) при средней загрузки кузова в 30%, скорости перемещения 15 см/с и при оценке, что надо переместить 1200 тонн реголита.
Три четверти всего времени экскаваторы будут проводить в дороге, так что скорость и точность их перемещения — это ключевой показатель. Предполагается, что у них не будет полноценной собственной системы навигации. Всё управление будет осуществляться операторами с Земли в реальном режиме времени, а также в частично автономном режиме под наблюдением операторов.
