Эта киберплатформа несёт до 9 грамм полезной нагрузки.
Возьмём гусеницу. В какой-то момент она начинает сама переделывать себя в бабочку. Вопрос прост: можно ли дать ей для сборки синтетические компоненты, которые позволят получить киборга-насекомое? Ответ – да, можно. И Мишель Махарбиз это сделал.
Когда этот учёный из Беркли создал первого киборга-жука, к нему сразу пришли военные (DARPA) и спросили, собирается ли он убивать людей, плюс что будет, если его жук убежит и начнёт бешено размножаться.
Махарбиз пояснил, что людей он не убивает, опасных насекомых делать не планирует (пока), и размножения их не боится, потому что киборг инструкцию по своей сборке во время секса не передаёт. Защитникам прав животных он пояснил, что жуков не мучает, и жалоб от них на плохое обращение не поступало. Правда, он сейчас как раз рассматривает этические аспекты использования насекомых как комплектующих для электроники, но это дело десятое.
Выбор носителя
Махарбиз взял за основу жуков. Выбор достаточно интересен: дело в том, что биологическая конструкция жука такова, что он содержит в себе что-то типа аккумуляторного элемента питания и может нести на 20% больше своего веса. То есть в жуке есть запас на апгрейды и фичи, плюс батарейка, которая долго его питает и открывает некоторую свободу использования.
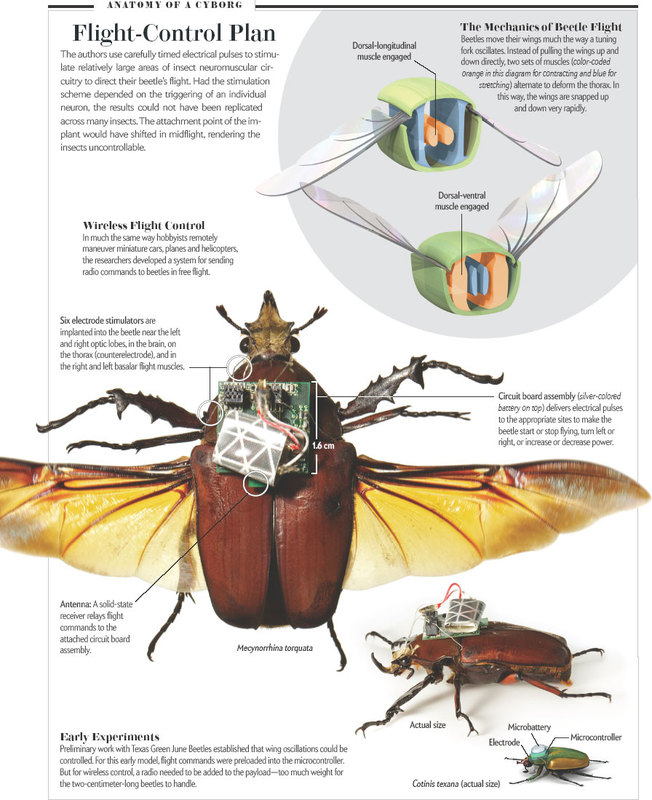
Технология управления
Если говорить упрощённо, жуки управляются через определённые резонансные частоты. Разные события с мускулами вызывают разную стимуляцию резонанса панциря, что, в свою очередь, активизирует действия других определённых групп мускулов. Управляя резонансом, можно отдавать команды жуку.
Махарбиз взял и вставил в жука оптические стимуляторы в мозг и электростимуляторы в пару основных мускулов. Первый тип взаимодействия – это работа с мозгом: начать и завершить колебания. Второй тип – это стимуляция базального мускула с каждой стороны для поворотов. Грубо говоря, когда этот мускул у жука напрягается, жук целиком понимает, что у него поворот – и начинает это делать. Чем-то похоже на систему прерываний.
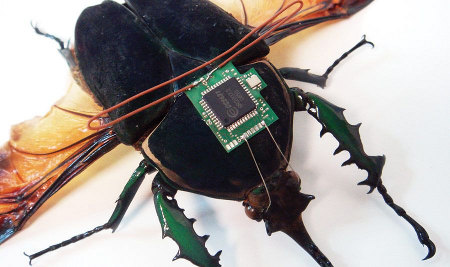
Позже система трансформировалась в микроантенну, микроконтроллер, который имеет приемник-передатчик и небольшой микрофон для того, чтобы слушать колебания для синхронизации крыльев (жук летает по очень сложной схеме, поэтому это крайне важно). В качестве пульта подключили Wii — и начали играть жуком.
Первое, что выяснилось — в мозге жука есть некоторое место, которое даёт 98% вероятность правильного исполнения команды на «запуск» и «остановку» жука. В зависимости от сигнала биосистемы жука адаптируются к лётной позиции, например — и попадают в цикл, где не могут остановиться, пока сигнал не прекратится. Так получилось научиться управлять жуком по двум каналам: «полетели-приземлились» и «поворот направо – поворот налево».
Учитывая, что есть жуки, которые могут переносить 7-9 грамм полезной нагрузки, понятно, почему примерно в этот момент военные живо заинтересовались Махарбизом и биологией в целом.
Ограничения
Понятно, что жук, даже проапгреженный до гордого звания киборга – не робот, поэтому откалибровать систему точно не получается. От насекомого к насекомому погрешности управления отличаются: дело в том, что каждый киборг имеет собственную биологическую балансировочную систему, плюс собственную нервную систему, которая поколениями выстраивалась для реакции на разные импульсы из внешнего мира. Жуки банально разные, поэтому без промежуточного звена в цепочке управления, выполняющего роль синхронизатора-калибровщика, одинаковой реакции добиться не выйдет.
Ещё одна проблема проистекает от той же нервной системы. Управление пока низкоуровневое, то есть затрагивает базовые уровни воздействия. Киборг в процессе выполнения ответственной миссии может заинтересоваться цветком, «жуком противоположного пола» или чем-то ещё интересным и важным – и это сразу порушит систему приоритетов, либо просто вызовет постороннюю активность. В конце концов, жуку про учёных и Пентагон никто не объяснил, поэтому он пробует жить как-то сам.
Продолжение исследований
Потом коллеги Махарбиза нашли мускул-склерит, который в одиночку отвечал за управление полётом. Отмоделировав насекомое на специальной установке, удалось повысить точность контроля — и уже не на уровне прямого воздействия, а, грубо говоря, физиологическим воздействием направляя «мысли» жука. Теперь учёным не хватает обратной связи от сенсорных систем насекомого для точного управления, но это уже решается.
Сделаем из него плеер?
Цифровая миниатюризация связана с биологией очень тесно. Биологические системы доступны в природе очень широко, они дешевы и их легко воспроизводить. Организмов много, плюс их можно выводить до нужной стадии. Результат – уже сейчас можно использовать некоторых насекомых в качестве комплектующих к различной технике. Например, в них уже есть встроенный гироскоп, летающий блок и типовые сенсоры.
Представьте ситуацию: при постановке на поток, сделать из насекомого управляемую платформу стоит, например, около 1000 рублей, плюс около 3-4 тысяч стоит базовая станция для управления. Это очень грубое использование насекомого вполне может оказаться сначала развлечением, а потом — индустрией.
Пойдём дальше. Можно начать производить различные странные вещи, которые будут смесью живых и неживых цепей. Синтетические контрольные сети и биологические компоненты – это уже реальность, причём немного страшная. И это именно то, чем занимаешься Махарбиз сейчас в Беркли.
Возможно, один такой уже летает у вас за спиной.
А теперь получим контроль над нейросистемами
В куколку можно вставить киберимплант на стадии, когда она формируется (не слишком рано — погибнет, и не слишком поздно — отторгается). Японские ученые провели исследования по имплантации микроконтроллеров в голову насекомого. Когда эта штука развилась, контроллер стал идеальной системой управления, к которой можно было подключить всю нужную периферию и питание. СМИ запаниковали, но тогда особого практического смысла в открытии не было.
Через полтора года в Беркли нашелся способ встраивать в бабочку интерфейс, через который проходили нейроны к глазу. Гипотезу проверили: в куколку имплантировали перфорированный гибкий полимер, который дал потрясающее слияние. Глаз сформировался правильно, но так, что нейроны проходили через имплант — и этот имплант мог снимать с них данные. Проще говоря, получилось создать технологию записи изображения из глаза (правда, пока на входе непонятно что, нужно ещё декодировать «протокол» передачи данных внутри насекомого).
Насекомое с таким имплантом ведёт себя нормально и нормально реагирует на внешний мир, в том числе – среди себе подобных. Сейчас группа Махарбиза записывает нейронные события и анализирует данные. Планируется уменьшать интерфейс для записи большего количества событий. Мечта — собирать все данные с сенсоров насекомого и использовать их для автоматизированного управления и других задач.
И батарейки тоже
Следующий прорыв — это топливная ячейка на насекомом. Учёные модифицировали глюкозную топливную ячейку и установили её на жука. Жук подаёт в организм глюкозу (он питается продуктами с ней), ячейка производит электроэнергию для других киберсистем жука. Сейчас такая ячейка работает несколько недель и даёт 10-20 мкВт. В перспективе – пара лет и 100мкВт. Можно и больше, потребуется более совершенная технология или больше ячеек в насекомом. Радиопередатчики уже можно собирать без особых сложностей, просто дорого.

Махарбиз передаёт привет Хабру на тестах сигнала из Беркли. Сейчас он показывает нового жука из Таиланда: из него можно собрать что-нибудь полезное.
Ссылки
- Недавняя лекция на русском и английском в Digital October (там много про конструкцию насекомых и суть биотехнологических исследований);
- О Мишеле на сайте Беркли;
- Новость про DARPA и интерес к жукам;
- Видео с тестовым жуком в альфе.
И напоследок: сейчас в лаборатории этих замечательных людей крутится проект нейросистемы, который даст на выходе пыль. Её планируется наносить на кожу, чтобы устанавливать интерфейс, например, с сотовым телефоном. Добро пожаловать в будущее.
P.S. Вот следующие бесплатные лекции в Digital October — ближайшая про то, каким должен быть проект, чтобы в него инвестировали, и чуть дальше — про EQ.
