Создать квадрокоптер как платформу для летающего робота я планирую уже очень давно. Первые расчеты и заказ деталей я сделал год еще назад. Однако, делать «просто коптер» чтобы полетать, управляя с пультом или даже в FPV режиме конечной задачей не является. Поэтому коптер должен быть максимально гибким и как можно менее дорогим.
По отдельности все детали для коптера есть, но их сопряжение — дело простое только в теории. Нужно быть и программистом и инженером и моделистом — вертолетчиком. Поэтому процесс движется довольно небыстро. А летать хочется :) Ничто так не расхолаживает и не демотивирует как отсутствие видимых результатов, особенно когда прогресс-то вроде есть, но не наглядный. Да и экспериментировать сразу на большом квадракоптере дорого и опасно.
Поэтому я решил собрать для экспериментов миникоптер. Как всегда — задача сделать недорого, просто и гибко.
Мой результат — готовый коптер за 1 день (на сборку и запуск) и $120 (стоимость квадрокоптера включая доставку). А с аппаратурой — $145.

«MiniQuadroCopter»
Под катом описание и видео.
Buddy-коды для заказа на HobbyKing
Кому как, а для меня основной преградой в коптеростроении всегда была дороговизна проверенных наборов деталей (kit), которые можно купить в одном месте и поэкспериментировать. Ведь собрав коптер, просто так летать надоест очень быстро, если, конечно, вы не авиамоделист, для которого это лишь еще одна забавная моделька. Самое интересное — добавить коптеру немного (или много, зависит от умений и изобретательности) самостоятельности. Но пока поднимешь коптер в воздух потратишь столько сил, что на самое интересное запал уже начинает угасать. Да и пока отладишь программу управления — разоришься, ведь каждая ошибка — это почти наверняка падение, а самое дешевое падение — это сломанные пропеллеры.
Сейчас покажу, как это преодолеть.
На самом деле основной бюджет коптера еще меньше, всего около $100 включая доставку.
Итак, обязательные запчасти:
Вот и весь джентльменский набор.
Но нам понадобится и кое-что дополнительно. Возможно, у вас что-то из этого имеется, поэтому заказывайте то, чего не хватает:
Радиоаппаратура у меня Turnigy 9x, которую я доработал для использования с LiIon аккумулятором и впаял разъем для обновления прошивки аппаратуры (я пользуюсь прошивкой er9x), но ее сейчас очень долго ждать из-за ее популярности, поэтому и не стал ее рекомендовать. Вообще, берите любую, какая есть в наличии и которая вам нравится с количеством каналов от 4. У меня Mode2 (ручка газа слева), но это не принципиально. Если возьмете 6-канальную Hobby King 2.4Ghz 6Ch Tx & Rx V2, не забудьте к ней шнурок для программирования, т.к. на ней самой никаких настроек не сделать, даже реверсировать каналы. Настраивается только с ПК.
Я покупал на HobbyKing только потому, что абсолютно все, что нам понадобится можно заказать там, но вы можете брать на rctimer.com или в любом другом месте. Если будете брать на HK, заказывайте сразу внизу нужные combo детали — так будет дешевле, чем набирать их по отдельности.
ЗИП:
Нам понадобятся еще винтики М2х10 или М3х10 (их проще достать в магазине, но придется чуть-чуть рассверлить отверстия в креплении моторов, это несложно).
Аккумуляторов берите по возможности хотя бы пару. Если нет зарядки для LiPo аккумуляторов, тоже
берите, это разовое вложение, пригодится.
Пропеллеров берите побольше. Не смотрите, что их по 5 штук в пакете. Я в первый день сломал 4 штуки, пока настраивал и обнаружил глюк в прошивке. :) Это расходный материал, особенно в тесной комнате как у меня.
Запасные моторы тоже, наверное не помешают, но это позднее, сразу вы их вряд ли сломаете.
Понадобится также паяльник, немного припоя и флюса, термоусадочная трубка диаметром 2 и 5 мм или изолента, резинка для денег или от трусов для крепления аккумулятора :)
Как только определились что у нас есть, а что заказываем и в каком количестве, заказываем и спокойно ждем недельки три (ну это как повезет с почтой).
Собирается весь квадрокоптер за 1 выходной. На самом деле даже быстрее. Я потратил около 6 часов в сумме, работая не торопясь.
Сначала собираем раму. Приходит она вот в таком виде (мелкие детали на фото отсутствуют, они в пакете)

«MiniQuadroCopter Frame»
Боковинки каждого луча склеиваем с помощью ПВА-М или суперклея (ПВА-М дает прочные эластичные швы, но собирать раму лучше вечерком, чтобы до утра оставить клей высохнуть как следует). Собираем все лучи и приклеиваем к нижней центральной пластине. Верхнюю пока отложите в сторону. Ножки лучей склеиваются из двух одинаковых половинок. Поскольку в луче всего 5 деталей (2 стенки и три распорки :), думаю, что сложности в сборке не составит.
Откладываем раму сохнуть до утра. А с утра достаем паяльник, термоусадку, провода и садимся паять.
Сначала продеваем провода всех 4х ESC в лучи вот таким макаром:

«ESC placement»
Затем берем толстый провод, отрезаем по 2 куска красного и черного цветов длиной сантиметров по 5-7. Зачищаем с концов по 5 мм и в середине примерно 5-7 мм. Куски спаиваем зачищенными серединами крест-накрест. Получится два креста — черного и красного цветов. Концы пока просто залудить.
Затем к красному перекрестию припаиваем красные концы от всех четырех ESC, не забыв надеть кусочки термоусадочной трубки по 1.5-2 см. То же самое проделываем с черной крестовиной. Размещаем все это в центре квадрокоптера.
Отрезаем еще по 1 куску толстого провода и припаиваем их к перекрестьям, концы выводим в отверстие в днище коптера, а место спайки изолируем:

«MiniQuadroCopter electrics»
Проверьте все внимательно, чтобы не было непропаев и коротких замыканий. Припоя не жалейте, токи тут очень серьезные текут, поэтому площадь контакта нужна побольше.
Если все в порядке, можно смазать ПВА-М верхнюю крестовину коптера и приклеить ее, спрятав таким образом все силовые провода внутри. На хвостик из просунутых в отверстие днища проводов надеваем термоусадку и припаиваем коннектор XT60 в соответствии с обозначенной на нем полярностью (красный провод к +).
Теперь крепим моторы к раме парой винтов М3х10, подложив с обратной стороны шайбу. Просовывем в отверстие в раме провода от мотора, припаиваем их к ESC. Перед пайкой наденьте термоусадочные кембрики, но пока не усаживайте их, после проверки может понадобиться сменить направление вращения мотора, для этого нужно поменять местами любые два провода.
Выглядит в готовом виде это примерно так:

«ESC2Motor»
Ну вот, теперь можно проверить и настроить ESC и моторы.
Не надевая пропеллеры, подключаем к ресиверу в 3й канал — это Throttle в стандартной 4х канальной схеме (или серво-тестеру, если имеется), затем включаем передатчик (предварительно нужно связать их- bind, эта операция описана в инструкции). Подключаем аккумулятор к коннектору XT60. После писка от ESC плавно даем газ и проверяем, что мотор с ESC в порядке.
Повторяем процедуру для остальных моторов. Я бы заодно порекомендовал настроить тип батареи и скалибровать газ, но это можно и потом.
Проверяя моторы, обратите внимание на направление вращения. Нам нужно, чтобы два мотора напротив друг друга вращались в одну сторону, а соседние — в разные:

Поменять направление вращения мотора, напоминаю, можно поменяв местами любые 2 из трех проводов, которые идут к ESC. Можно сразу пронумеровать моторы по схеме соответственно направлению вращения и подписать карандашом на лучах.
Все вращается правильно и реагирует на ручку газа передатчика правильно? Замечательно, переходим к плате управления.
Она поставляется в мягком корпусе из пеноматериала. аккуратно ее извлекаем, переворачиваем и вставляем обратно, а мягкий корпус на двусторонний скотч или клей крепим на раму так, как указано на картинке выше, чтобы стрелка смотрела между лучами, на которых установленым моторы 1 и 2.
Сбоку к нему клеим на двусторонний скотч ресивер радиоаппаратуры (антенну крепим к одному из лучей):

«Connections»
Я наклеил стрелку на корпус, чтобы было легче ориентироваться на земле где у коптера перед.
Теперь подключаем мозги — скорее всего 2-3 из 4 ESC не достанут до платы управления, тут то и пригодятся servo extension кабели. Но их можно сделать самим. Нужна 3пиновая вилка из обычный PLS гребенки с шагом 2.54 ммм и половинка кабеля для соединения ресивера и платы управления (нам нужен Female коннектор).
Подключаем моторы соответственно нумерации в разъемы M1-М4

«HobbyKing Multi-Rotor Control Board V2.1»
сигнальный провод к центру платы, землю к краю (на предыдущей фото все видно).
Теперь подключаем ресивер. По умолчанию 4-х канальная настройка такая:
1 — Aileron (элероны, ROLL)
2 — Elevator (тангаж, PITCH)
3 — Throttle (газ)
4 — Rudder (руль направления, рыскание, YAW)
Вот и подключаем по порядку каналы к плате, на ней подписано соответственно AIL, ELE, THR, RUDD.
Только не 4 проводами, а проще: первый подключаем как положено — черный провод (земля) к краю платы, сигнальный внутрь, а остальные три канала подключаем одним проводом, нас интересует только сигнальный провод:

«Receiver Connection»

«Receiver Connection»
Все, осталось прикрепить батарею и коптер собран. Тут и настал черед резинки :)

«Крепление батареи»
Батарею при взвешивании просто положил сверху.

«miniQuadrocopter Weight»
Осталось прошить плату управления и настроить коптер.
Для прошивки используем AVR ISP программатор. Подключение такое:
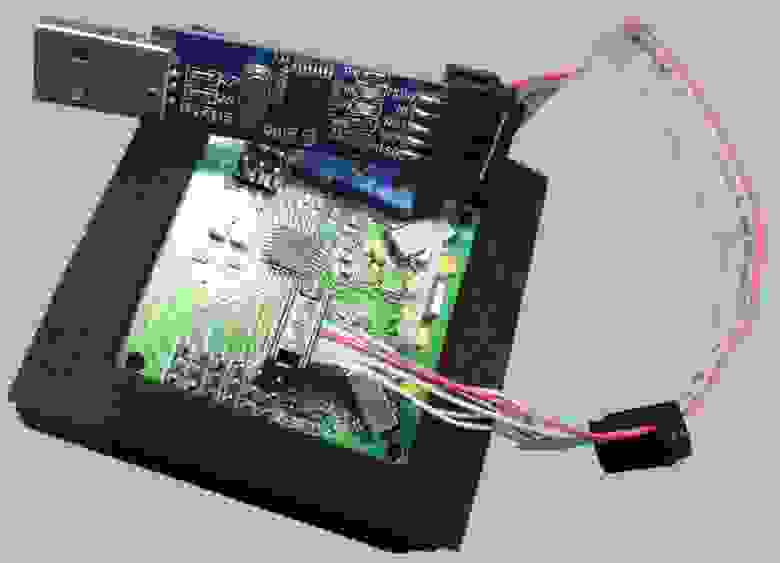
Т.к. плата является клоном Kaptein Kuk quadrokopter, можно воспользоваться их софтинкой (KKmulticopter Flash) для прошивки.
У меня стабильно заработала прошивка XXcontrol_KR_XCopter v2.5. Ее можно прошить с помощью avrdude:
или выбрать в программульке для прошивки, она скачает сама.

«Quadrocopter Firmware flash»
v4.7 от Kaptein Kuk у меня заработала некорректно, поэтому не советую ее.

Отключаем от программатора, выполняем настройку по инструкции (пункты 1, 2, 4 и 8, остальное по желанию).
Все, полетели :)
Взлетать советую медленно и очень осторожно. Сначала поставьте коптер стрелкой от себя, нужно попробовать приподнять коптер газом, если наклоняется или вращается, триммируем его, чтобы он взлетал без перекоса (попробуйте покачать аккуратно стиками элеронов и тангажа, буквально касаясь их, пока он еще на земле, чтобы убедиться, что все каналы работают правильно, если нет, инвертируйте нужные, у меня это был канал Elevator). Затем если он покачивается стиками правильно, чуть-чуть добавьте газа, чтобы взлетел на пару сантиметров, и опускайте обратно. Ну и дальше учимся летать :) (Я пока определил что к чему, сломал 2 пропеллера об стену — глюк прошивки v4.7, а потом еще в процессе настройки коэффициентов усиления гироскопов сломал еще пару — коптер раскачивался и задел диван, дома тесно, поэтому дома больше не летаю). Если не уверены или страшно — наденьте защитные очки и оденьтесь, пропеллеры бьют ощутимо, мне не попадало по рукам, но они острые и вращаются очень быстро!
Как освоите эту платформу, можно ставить свой контроллер или писать свою прошивку, добавлять акселерометры, барометр, компас, сонар, GPS, телеметрию, LPS лазер и делать из платформы робота. Но сначала получаем удовольствие, от винта, мы взлетели!
Удачных вам полетов!
UPD: Сегодня ветер стих до приемлемых около 3 м/с, немного подсохло после дождя и я нацепив батарею потяжелее вышел опробовать на улице.
Ведет себя довольно стабильно:
Более подробное описание конфигурации, технические детали и еще одно видео, чуть более динамичное этом посте
UPD2: Уже не раз спрашивали как запустить плату и когда должны пискнуть моторы. Прилагаю диаграмму движений стиками для управления платой.
При включении питания светодиод не горит, плата в состоянии disarmed, ESC не инициированы.
Процесс запуска называется Arming и сопровождается писком ESC (моторов) и зажиганием светодиода.
соответственно — Disarming — наоборот, выключает плату, после этого на стики она не реагирует. Крайне рекомендую делать это прежде чем подходить к ней!
На диаграмме показано для аппаратуры как в Mode1 так и в Mode2 (самый популярный вариант, у меня такой же).
UPD 27.05.2013
Внимание, я не рекомендую на данный момент приобретать полетный контроллер KK Multikopter ввиду сильной ограниченности его функционала.
Вместо него лучше приобрести любой совместимый с MultiWii. Например Crius MultiWii SE, MultiWii Light или его аналог NanoWii на Hobbyking. Благо стоят они теперь совсем недорого. Настройка его не намного сложнее, зато есть возможность визуально посмотреть что происходит, подключив его к компьютеру и коптер сможет держать горизонт самостоятельно.
По отдельности все детали для коптера есть, но их сопряжение — дело простое только в теории. Нужно быть и программистом и инженером и моделистом — вертолетчиком. Поэтому процесс движется довольно небыстро. А летать хочется :) Ничто так не расхолаживает и не демотивирует как отсутствие видимых результатов, особенно когда прогресс-то вроде есть, но не наглядный. Да и экспериментировать сразу на большом квадракоптере дорого и опасно.
Поэтому я решил собрать для экспериментов миникоптер. Как всегда — задача сделать недорого, просто и гибко.
Мой результат — готовый коптер за 1 день (на сборку и запуск) и $120 (стоимость квадрокоптера включая доставку). А с аппаратурой — $145.

«MiniQuadroCopter»
Под катом описание и видео.
Buddy-коды для заказа на HobbyKing
Кому как, а для меня основной преградой в коптеростроении всегда была дороговизна проверенных наборов деталей (kit), которые можно купить в одном месте и поэкспериментировать. Ведь собрав коптер, просто так летать надоест очень быстро, если, конечно, вы не авиамоделист, для которого это лишь еще одна забавная моделька. Самое интересное — добавить коптеру немного (или много, зависит от умений и изобретательности) самостоятельности. Но пока поднимешь коптер в воздух потратишь столько сил, что на самое интересное запал уже начинает угасать. Да и пока отладишь программу управления — разоришься, ведь каждая ошибка — это почти наверняка падение, а самое дешевое падение — это сломанные пропеллеры.
Сейчас покажу, как это преодолеть.
Заказываем детали
На самом деле основной бюджет коптера еще меньше, всего около $100 включая доставку.
Итак, обязательные запчасти:
| Рама с моторами 445 мм | $28,95 |
| Плата управления (аналог KKmulticopter, но от HK) | $14,95 |
| ESC (регуляторы хода) | $5,96 х 4 |
| Пропеллеры прямого и обратного вращения | $1,34 + $1,94 |
| Резиновые кольца для крепления пропеллеров | $1,4 |
| Пропсейверы Prop Saver w/ Band 4mm (10pcs) | $3,99 |
| Аккумулятор на 1300мАч | $5,96 |
Вот и весь джентльменский набор.
Но нам понадобится и кое-что дополнительно. Возможно, у вас что-то из этого имеется, поэтому заказывайте то, чего не хватает:
| AVR ISP Программатор для платы управления (подойдет FTBB, USBASP, Arduino… любой) | $4,75 |
| Провода от ресивера к плате управления | $4 |
| Servo extension для подключения ESC — свои провода не достают, берите любые или спаяйте сами — там три проводка | |
| Радиоаппаратура — любая с 4 и более каналами | от $22,99 |
| Разъемы XT60 к батарее | $2.16 |
| Силовой провод или аналогичный медный красного и черного цветов (+ -) |
$1,29 |
Радиоаппаратура у меня Turnigy 9x, которую я доработал для использования с LiIon аккумулятором и впаял разъем для обновления прошивки аппаратуры (я пользуюсь прошивкой er9x), но ее сейчас очень долго ждать из-за ее популярности, поэтому и не стал ее рекомендовать. Вообще, берите любую, какая есть в наличии и которая вам нравится с количеством каналов от 4. У меня Mode2 (ручка газа слева), но это не принципиально. Если возьмете 6-канальную Hobby King 2.4Ghz 6Ch Tx & Rx V2, не забудьте к ней шнурок для программирования, т.к. на ней самой никаких настроек не сделать, даже реверсировать каналы. Настраивается только с ПК.
Я покупал на HobbyKing только потому, что абсолютно все, что нам понадобится можно заказать там, но вы можете брать на rctimer.com или в любом другом месте. Если будете брать на HK, заказывайте сразу внизу нужные combo детали — так будет дешевле, чем набирать их по отдельности.
ЗИП:
Нам понадобятся еще винтики М2х10 или М3х10 (их проще достать в магазине, но придется чуть-чуть рассверлить отверстия в креплении моторов, это несложно).
Аккумуляторов берите по возможности хотя бы пару. Если нет зарядки для LiPo аккумуляторов, тоже
берите, это разовое вложение, пригодится.
Пропеллеров берите побольше. Не смотрите, что их по 5 штук в пакете. Я в первый день сломал 4 штуки, пока настраивал и обнаружил глюк в прошивке. :) Это расходный материал, особенно в тесной комнате как у меня.
Запасные моторы тоже, наверное не помешают, но это позднее, сразу вы их вряд ли сломаете.
Понадобится также паяльник, немного припоя и флюса, термоусадочная трубка диаметром 2 и 5 мм или изолента, резинка для денег или от трусов для крепления аккумулятора :)
Как только определились что у нас есть, а что заказываем и в каком количестве, заказываем и спокойно ждем недельки три (ну это как повезет с почтой).
Собираем наш квадрик
Собирается весь квадрокоптер за 1 выходной. На самом деле даже быстрее. Я потратил около 6 часов в сумме, работая не торопясь.
Сначала собираем раму. Приходит она вот в таком виде (мелкие детали на фото отсутствуют, они в пакете)

«MiniQuadroCopter Frame»
Боковинки каждого луча склеиваем с помощью ПВА-М или суперклея (ПВА-М дает прочные эластичные швы, но собирать раму лучше вечерком, чтобы до утра оставить клей высохнуть как следует). Собираем все лучи и приклеиваем к нижней центральной пластине. Верхнюю пока отложите в сторону. Ножки лучей склеиваются из двух одинаковых половинок. Поскольку в луче всего 5 деталей (2 стенки и три распорки :), думаю, что сложности в сборке не составит.
Откладываем раму сохнуть до утра. А с утра достаем паяльник, термоусадку, провода и садимся паять.
Сначала продеваем провода всех 4х ESC в лучи вот таким макаром:

«ESC placement»
Затем берем толстый провод, отрезаем по 2 куска красного и черного цветов длиной сантиметров по 5-7. Зачищаем с концов по 5 мм и в середине примерно 5-7 мм. Куски спаиваем зачищенными серединами крест-накрест. Получится два креста — черного и красного цветов. Концы пока просто залудить.
Затем к красному перекрестию припаиваем красные концы от всех четырех ESC, не забыв надеть кусочки термоусадочной трубки по 1.5-2 см. То же самое проделываем с черной крестовиной. Размещаем все это в центре квадрокоптера.
Отрезаем еще по 1 куску толстого провода и припаиваем их к перекрестьям, концы выводим в отверстие в днище коптера, а место спайки изолируем:

«MiniQuadroCopter electrics»
Проверьте все внимательно, чтобы не было непропаев и коротких замыканий. Припоя не жалейте, токи тут очень серьезные текут, поэтому площадь контакта нужна побольше.
Если все в порядке, можно смазать ПВА-М верхнюю крестовину коптера и приклеить ее, спрятав таким образом все силовые провода внутри. На хвостик из просунутых в отверстие днища проводов надеваем термоусадку и припаиваем коннектор XT60 в соответствии с обозначенной на нем полярностью (красный провод к +).
Теперь крепим моторы к раме парой винтов М3х10, подложив с обратной стороны шайбу. Просовывем в отверстие в раме провода от мотора, припаиваем их к ESC. Перед пайкой наденьте термоусадочные кембрики, но пока не усаживайте их, после проверки может понадобиться сменить направление вращения мотора, для этого нужно поменять местами любые два провода.
Выглядит в готовом виде это примерно так:

«ESC2Motor»
Ну вот, теперь можно проверить и настроить ESC и моторы.
Не надевая пропеллеры, подключаем к ресиверу в 3й канал — это Throttle в стандартной 4х канальной схеме (или серво-тестеру, если имеется), затем включаем передатчик (предварительно нужно связать их- bind, эта операция описана в инструкции). Подключаем аккумулятор к коннектору XT60. После писка от ESC плавно даем газ и проверяем, что мотор с ESC в порядке.
Повторяем процедуру для остальных моторов. Я бы заодно порекомендовал настроить тип батареи и скалибровать газ, но это можно и потом.
Проверяя моторы, обратите внимание на направление вращения. Нам нужно, чтобы два мотора напротив друг друга вращались в одну сторону, а соседние — в разные:
Поменять направление вращения мотора, напоминаю, можно поменяв местами любые 2 из трех проводов, которые идут к ESC. Можно сразу пронумеровать моторы по схеме соответственно направлению вращения и подписать карандашом на лучах.
Все вращается правильно и реагирует на ручку газа передатчика правильно? Замечательно, переходим к плате управления.
Она поставляется в мягком корпусе из пеноматериала. аккуратно ее извлекаем, переворачиваем и вставляем обратно, а мягкий корпус на двусторонний скотч или клей крепим на раму так, как указано на картинке выше, чтобы стрелка смотрела между лучами, на которых установленым моторы 1 и 2.
Сбоку к нему клеим на двусторонний скотч ресивер радиоаппаратуры (антенну крепим к одному из лучей):

«Connections»
Я наклеил стрелку на корпус, чтобы было легче ориентироваться на земле где у коптера перед.
Теперь подключаем мозги — скорее всего 2-3 из 4 ESC не достанут до платы управления, тут то и пригодятся servo extension кабели. Но их можно сделать самим. Нужна 3пиновая вилка из обычный PLS гребенки с шагом 2.54 ммм и половинка кабеля для соединения ресивера и платы управления (нам нужен Female коннектор).
Подключаем моторы соответственно нумерации в разъемы M1-М4

«HobbyKing Multi-Rotor Control Board V2.1»
сигнальный провод к центру платы, землю к краю (на предыдущей фото все видно).
Теперь подключаем ресивер. По умолчанию 4-х канальная настройка такая:
1 — Aileron (элероны, ROLL)
2 — Elevator (тангаж, PITCH)
3 — Throttle (газ)
4 — Rudder (руль направления, рыскание, YAW)
Вот и подключаем по порядку каналы к плате, на ней подписано соответственно AIL, ELE, THR, RUDD.
Только не 4 проводами, а проще: первый подключаем как положено — черный провод (земля) к краю платы, сигнальный внутрь, а остальные три канала подключаем одним проводом, нас интересует только сигнальный провод:

«Receiver Connection»

«Receiver Connection»
Все, осталось прикрепить батарею и коптер собран. Тут и настал черед резинки :)

«Крепление батареи»
Батарею при взвешивании просто положил сверху.

«miniQuadrocopter Weight»
Осталось прошить плату управления и настроить коптер.
Для прошивки используем AVR ISP программатор. Подключение такое:
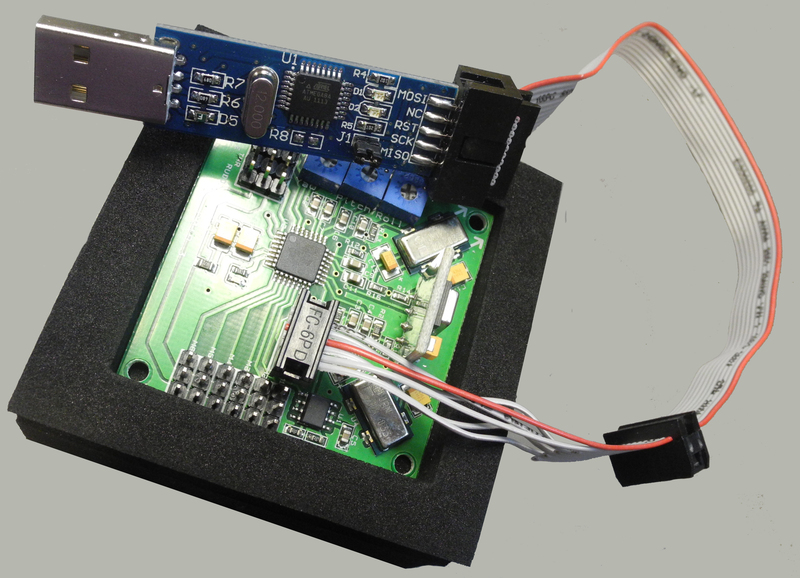
Т.к. плата является клоном Kaptein Kuk quadrokopter, можно воспользоваться их софтинкой (KKmulticopter Flash) для прошивки.
У меня стабильно заработала прошивка XXcontrol_KR_XCopter v2.5. Ее можно прошить с помощью avrdude:
avrdude -c usbasp -p m168p -U flash:w:XXcontrol_KR_XCopter_v2_5.hex:aили выбрать в программульке для прошивки, она скачает сама.

«Quadrocopter Firmware flash»
v4.7 от Kaptein Kuk у меня заработала некорректно, поэтому не советую ее.

Отключаем от программатора, выполняем настройку по инструкции (пункты 1, 2, 4 и 8, остальное по желанию).
Все, полетели :)
Взлетать советую медленно и очень осторожно. Сначала поставьте коптер стрелкой от себя, нужно попробовать приподнять коптер газом, если наклоняется или вращается, триммируем его, чтобы он взлетал без перекоса (попробуйте покачать аккуратно стиками элеронов и тангажа, буквально касаясь их, пока он еще на земле, чтобы убедиться, что все каналы работают правильно, если нет, инвертируйте нужные, у меня это был канал Elevator). Затем если он покачивается стиками правильно, чуть-чуть добавьте газа, чтобы взлетел на пару сантиметров, и опускайте обратно. Ну и дальше учимся летать :) (Я пока определил что к чему, сломал 2 пропеллера об стену — глюк прошивки v4.7, а потом еще в процессе настройки коэффициентов усиления гироскопов сломал еще пару — коптер раскачивался и задел диван, дома тесно, поэтому дома больше не летаю). Если не уверены или страшно — наденьте защитные очки и оденьтесь, пропеллеры бьют ощутимо, мне не попадало по рукам, но они острые и вращаются очень быстро!
Как освоите эту платформу, можно ставить свой контроллер или писать свою прошивку, добавлять акселерометры, барометр, компас, сонар, GPS, телеметрию, LPS лазер и делать из платформы робота. Но сначала получаем удовольствие, от винта, мы взлетели!
Удачных вам полетов!
UPD: Сегодня ветер стих до приемлемых около 3 м/с, немного подсохло после дождя и я нацепив батарею потяжелее вышел опробовать на улице.
Ведет себя довольно стабильно:
Более подробное описание конфигурации, технические детали и еще одно видео, чуть более динамичное этом посте
UPD2: Уже не раз спрашивали как запустить плату и когда должны пискнуть моторы. Прилагаю диаграмму движений стиками для управления платой.
При включении питания светодиод не горит, плата в состоянии disarmed, ESC не инициированы.
Процесс запуска называется Arming и сопровождается писком ESC (моторов) и зажиганием светодиода.
соответственно — Disarming — наоборот, выключает плату, после этого на стики она не реагирует. Крайне рекомендую делать это прежде чем подходить к ней!
На диаграмме показано для аппаратуры как в Mode1 так и в Mode2 (самый популярный вариант, у меня такой же).
UPD 27.05.2013
Внимание, я не рекомендую на данный момент приобретать полетный контроллер KK Multikopter ввиду сильной ограниченности его функционала.
Вместо него лучше приобрести любой совместимый с MultiWii. Например Crius MultiWii SE, MultiWii Light или его аналог NanoWii на Hobbyking. Благо стоят они теперь совсем недорого. Настройка его не намного сложнее, зато есть возможность визуально посмотреть что происходит, подключив его к компьютеру и коптер сможет держать горизонт самостоятельно.
