Привет всем!
Вот решил написать о своём проекте и послушать что люди про него думают. Мне не хватает кармы чтобы написать в DIY или Робототехнику, но возможно, попозже перенесу, если доживу до нужной кармы
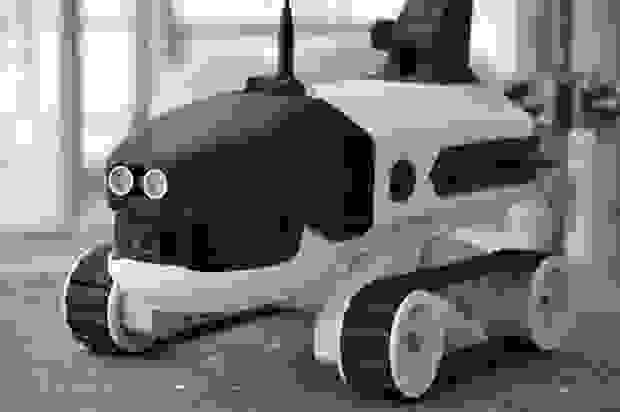
Два моих приятеля и я, как энтузиасты 3Д-печати, Линукса и открытых технологий сделали небольшого робота под названием «Ветер» предназначенного для экспериментов в области навигации, управления, компьютерного зрения и других типичных задач робототехники.
Нашей основной целью было создание платформы, которая предоставляла бы базовый набор функциональности и была легко модифицируемой для нужд конкретных проектов. Для достижения этой цели, было принято решение использовать технологию 3Д печати для изготовления корпуса. Благодаря этому, можно легко интегрировать новые сенсоры и актуаторы (например, установить Кинект сенсор). Использование Линукса и открытой аппаратной платформы BeagleBoard-xM также открывает широкие возможности для модификаций и расширений.

Это один из вариантов робота (с одной камерой) на фоне нашего 3Д-принтера
Робот «Ветер» оснащен широким набором сенсоров: двумя видеокамерами установленными на вращающейся платформе, цифровым компасом с компенсацией наклонов, четырьмя ультразвуковыми дальномерами, возможностью связи через WiFi или UMTS, GPS приемником и сенсором освещенности. Использование BeagleBoard-xM в качестве бортового компьютера предоставляет, вычислительную мощность достаточную для адаптивного сжатия видео в реальном времени в формат h264 (с использованием интегрированного сигнального процессора), управления бортовой электроникой и выполнения достаточно сложных алгоритмов для навигации. В тоже время, благодаря экономичности ARM архитектуры, робот может работать 1.5-2 часа в автономном режиме питания.
Реализованный набор программных модулей предоставляет простой и удобный доступ ко всем установленным сенсорам и актуаторам (моторам) по сети. Благодаря этому, роботом можно управлять удаленно в ручном режиме, полностью автономно (запуская программу управления на бортовом компьютере) либо через Интернет, получая данные от сенсоров в реальном времени (Cloud Robotics). Для режима ручного управления через Интернет реализована программа отображающая данные с бортовых сенсоров, включая видео-поток с камер. Интересной особенностью проекта является использование Xenomai — системы позволяющей добиться значительно более высокой точности выполнения программ реального времени под управлением ядра Линукса. В частности, авторы реализовали Линукс-драйвер с использованием возможностей Xenomai, что позволило им добиться высокого качества управления моторами. Также, использование Xenomai позволило существенно упростить электронику для работы с сенсорами и управления моторами путем переноса функций управления на Линукс.

Программа для ручного управления роботом
Также, мы написали набор примеров, которые иллюстрируют как использовать предоставляемые программные интерфейсы для решения типичных задач в области робототехники.

Это плакат, сделанный дизайнерами для участия в выставках всяких
Отдельно хотелось бы отметить, что кроме программистов и электронщиков, этот проект привлек внимание 3Д дизайнеров, которые активно участвовали в создании 3Д моделей альтернативных вариантов корпусов. Примеры можно посмотреть на сайте Blender3D.ru.
Как уже упоминалось в начале, все модели для 3Д-печати, схемы для электроники и программное обеспечение доступно по ссылкам приведенным на сайте проекта:veterobot.org.
Вот решил написать о своём проекте и послушать что люди про него думают. Мне не хватает кармы чтобы написать в DIY или Робототехнику, но возможно, попозже перенесу, если доживу до нужной кармы
Два моих приятеля и я, как энтузиасты 3Д-печати, Линукса и открытых технологий сделали небольшого робота под названием «Ветер» предназначенного для экспериментов в области навигации, управления, компьютерного зрения и других типичных задач робототехники.
Нашей основной целью было создание платформы, которая предоставляла бы базовый набор функциональности и была легко модифицируемой для нужд конкретных проектов. Для достижения этой цели, было принято решение использовать технологию 3Д печати для изготовления корпуса. Благодаря этому, можно легко интегрировать новые сенсоры и актуаторы (например, установить Кинект сенсор). Использование Линукса и открытой аппаратной платформы BeagleBoard-xM также открывает широкие возможности для модификаций и расширений.
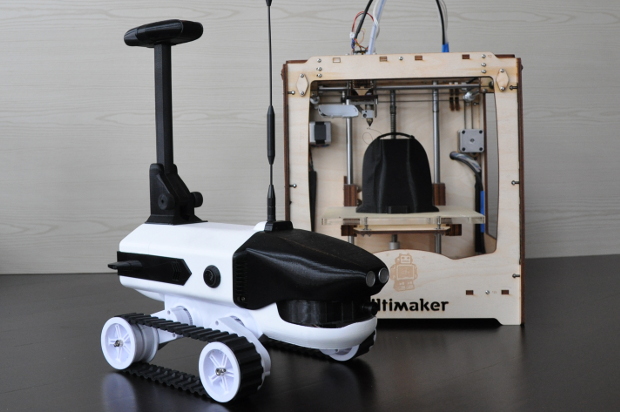
Это один из вариантов робота (с одной камерой) на фоне нашего 3Д-принтера
Робот «Ветер» оснащен широким набором сенсоров: двумя видеокамерами установленными на вращающейся платформе, цифровым компасом с компенсацией наклонов, четырьмя ультразвуковыми дальномерами, возможностью связи через WiFi или UMTS, GPS приемником и сенсором освещенности. Использование BeagleBoard-xM в качестве бортового компьютера предоставляет, вычислительную мощность достаточную для адаптивного сжатия видео в реальном времени в формат h264 (с использованием интегрированного сигнального процессора), управления бортовой электроникой и выполнения достаточно сложных алгоритмов для навигации. В тоже время, благодаря экономичности ARM архитектуры, робот может работать 1.5-2 часа в автономном режиме питания.

Реализованный набор программных модулей предоставляет простой и удобный доступ ко всем установленным сенсорам и актуаторам (моторам) по сети. Благодаря этому, роботом можно управлять удаленно в ручном режиме, полностью автономно (запуская программу управления на бортовом компьютере) либо через Интернет, получая данные от сенсоров в реальном времени (Cloud Robotics). Для режима ручного управления через Интернет реализована программа отображающая данные с бортовых сенсоров, включая видео-поток с камер. Интересной особенностью проекта является использование Xenomai — системы позволяющей добиться значительно более высокой точности выполнения программ реального времени под управлением ядра Линукса. В частности, авторы реализовали Линукс-драйвер с использованием возможностей Xenomai, что позволило им добиться высокого качества управления моторами. Также, использование Xenomai позволило существенно упростить электронику для работы с сенсорами и управления моторами путем переноса функций управления на Линукс.
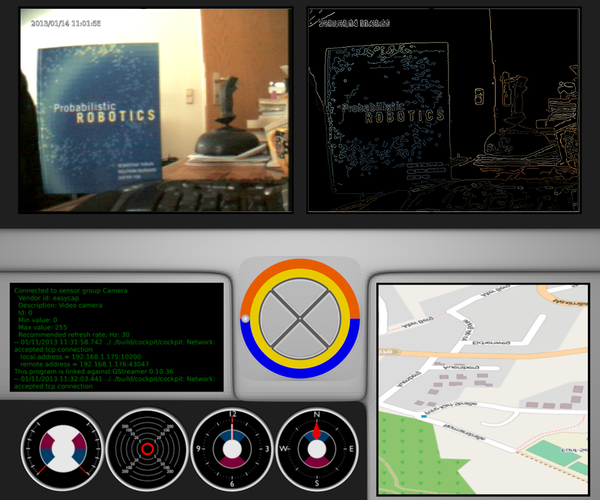
Программа для ручного управления роботом
Также, мы написали набор примеров, которые иллюстрируют как использовать предоставляемые программные интерфейсы для решения типичных задач в области робототехники.

Это плакат, сделанный дизайнерами для участия в выставках всяких
Отдельно хотелось бы отметить, что кроме программистов и электронщиков, этот проект привлек внимание 3Д дизайнеров, которые активно участвовали в создании 3Д моделей альтернативных вариантов корпусов. Примеры можно посмотреть на сайте Blender3D.ru.
Как уже упоминалось в начале, все модели для 3Д-печати, схемы для электроники и программное обеспечение доступно по ссылкам приведенным на сайте проекта:veterobot.org.
