 Прошло некоторое время после сборки моего квадрокоптера и предыдущей статьи.
Прошло некоторое время после сборки моего квадрокоптера и предыдущей статьи.Вдохновившись статьями (1, 2) товарища PaulMan решил написать свою. Правда не так подробно, и не в виде туториала, а скорее рассказ о первых месяцах использования и установке FPV.
Заветная даль
Полетав день на поле, накручивая круги, восьмерку и побаиваясь более сложных фигур, захотелось более высоких и дальних полетов.
Конечно, уже на второй день обладания техникой к нему была прицеплена мыльница, и совершены первые записи с борта.
Первые записи (скучно и сильные вибрации)
Первые впечатления: круто! Я и до этого знал, что хочу FPV, но тут понял, что это будет моё.
Дома нашлась завалявшаяся радио-«видеокамера» и приемник для неё, а так же USB устройство видеозахвата. Прикрутив камеру к коптеру, с ноутбуком подмышкой побежал на поляну. В принципе первый FPV полет состоялся… Но в той картинке, которую передавало это чудо — китайская камера, сложно было понять: что и куда летит.
Принято решение о покупке нормального приемника и передатчика. Но вот выбрать их не так-то просто…
Приемопередающая аппаратура
Для радиомоделей самые распространенные частоты передачи видео сигнала это:
- 900 MHz (длинна волны: 333.1 мм);
- 1.2-1.3 GHz (длинна волны: 234.2 мм);
- 2.4 GHz (длинна волны: 124.9 мм);
- 5.8 GHz (длинна волны: 51.6 мм).
Чем больше длинна волны, тем лучше у неё проникаемость через объекты, но тем меньше данных можно передать. Так же от частоты напрямую зависит размер антенн.
Качество картинки (количество передаваемых данных) в пределах этих частот, вроде бы, меняется несущественно, хотя некоторые говорят, что на 5.8 качество куда лучше.
Выбирать как-то надо. Опыта нет. Примеры посмотреть негде. Ну ладно, начнем с отсеивания:
- 2.4GHz — это частота WiFi, а я собирался летать в городе. Кстати, вообще не очень популярная частота, видимо именно по этой причине.
- 900MHz — огромные антенны. Да и сообщество всё больше выбирает 1.2ГГц, а не 0.9.
Остаются 1.2ГГц и 5.8ГГц.
Основываясь на данных с форумов (а они очень сильно разняться — кто-то говорит, что на 5.8 даже за одинокое дерево залететь нельзя, а кто-то уверяет, что за домом спокойно летал), решил рассматривать более низкую частоту.
Она тянет за собой две проблемы:
- Желательно, чтобы частота видео была выше пульта — более длинная волна может «перебивать» короткую. Мне не хотелось видеть в хорошем качестве, как мой квадрокоптер падает, лишившись управления.
- Вторая гармоника волны 1.2 совпадает с 2.4, что ещё ухудшает этот выбор.
И вроде бы логичный выбор: брать 5.8ГГц — и летать с ним. Но меня сильно угнетало, что на форуме очень много пишут про слабую проникающую способность.
В конце концов неожиданно для себя я решил: беру 1.2-1.3 ГГц, докупаю для него фильтр высоких частот и, если что-то будет не устраивать, докуплю приемник и передатчик на 433MHz для пульта.
Следующая проблема: мощность. Передатчики бывают от 10мвт до нескольких ватт (обычно уже с усилителями, но всё же). Какая мощность мне нужна? Многие говорят, что 800 мвт — хорошо. Другие говорят, что 100 мвт выше крыши. Я прикинул, что разнести видео-излучающую и принимающую управление антенны я сильно не смогу. А передающий сигнал всего 50 мвт. 800 мвт может «задавить» его, даже не совпадая по частотам. Причем люди очень аргументировано говорили про «100 мвт выше крыши». Я решил брать 200 мвт.
Так же для себя решил, от греха подальше, брать комплект, чтобы не ошибиться по совместимости (хотя выглядело всё просто — и приемник, и передатчик должны поддерживать хотя бы один одинаковый канал).
И вот я заказал 1.3Ghz 400mW передатчик в комплекте с приемником (да-да, не 200, а 400 — передумал в последний момент) ну и фильтр для него.
Начались недели ожидания и практика полетов.
Первые полеты «От первого лица»
Долгожданная посылка пришла. Взял у друга GoPro Hero 2 и установил всё на коптер. Первый полет — ощущения непередаваемые. Это компьютерная игра, тип «симулятор полета», с очень сложным управлением и одной жизнью, но только в реальности.
(На видео дополнительно запечатлены моя жена, родители и собака. Но я думаю никто не обидится.)
В общем — это круто! Если вы думаете, стоит или нет этим заниматься, то я вам советую: стоит! Только сначала прочитайте статьи PaulMan — там очень четко, может даже чересчур подробно, написано, с чего стоит начинать, как тренироваться и т.д.
Но, конечно, всё проходило не так гладко, как хотелось бы. Сигнал видео становился зашумленным уже через 50 метров (но это на моей тестовой поляне — в том месте до сих пор иногда пробивается шум). Пульт при тестах на земле то работал на 300 метров, то терял связь через 100.
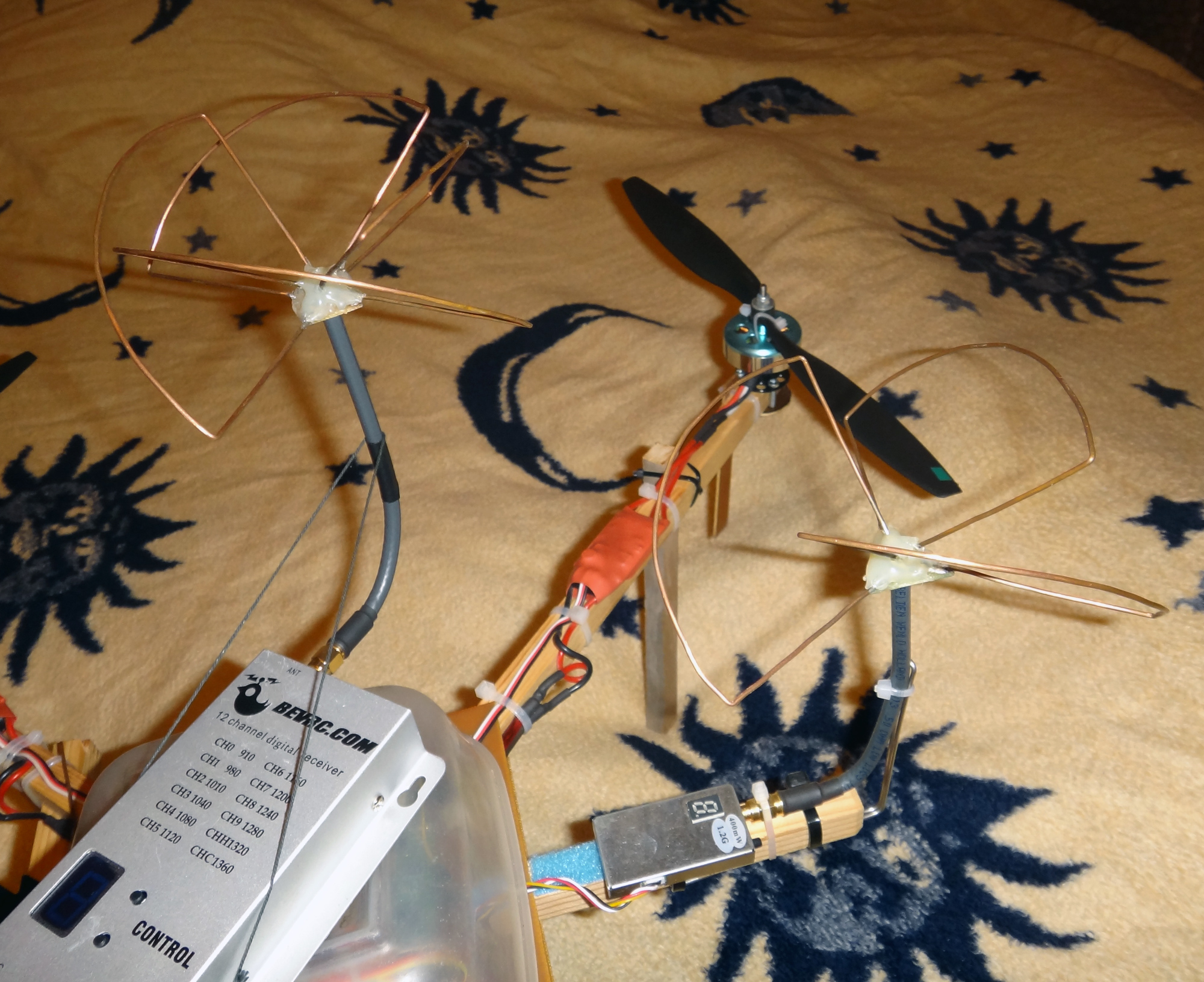 Первым делом решил переделать видео антенны. Решил делать 3х лепестковый "клевер" на передатчик и 4х лепестковый на приемник. Сигнал изменился в разы! Наземный тест показал дальность 3 километра — сигнал ещё был, но дальше по прямой ехать было уже некуда. Пульт всё так же работал на 100-300 метров.
Первым делом решил переделать видео антенны. Решил делать 3х лепестковый "клевер" на передатчик и 4х лепестковый на приемник. Сигнал изменился в разы! Наземный тест показал дальность 3 километра — сигнал ещё был, но дальше по прямой ехать было уже некуда. Пульт всё так же работал на 100-300 метров.Полетав один день так, я понял, что хочу летать дальше! Но я даже не мог улететь на всю дальность пульта — телеметрии нет — RSSI (Received Signal Strength Indication) данные передавать нечем. Обратной связи у пульта тоже нет.
Заказал модули OpenLRS для пульта и для модели. Сейчас, кстати, брал бы оба для модели и встраивал в пульт сам — не так уж хорошо он подходит. А так же заказал OSD (On Screen Display) модуль. Ну и всякой мелочи, конечно — пропеллеры, аккумулятор и т.д.
Опять ожидание и учебные полеты с FPV. За это время прикупил GoPro Hero 3 Black.
Забрав с почты долгожданную посылку, прикручиваю всё к коптеру. OpenLRS с оригинальными антеннами, вызывающий подозрения фильтр для видео можно выкинуть, и кончено OSD — сразу чувствуешь себя как пилот истребителя!
Естественно, не обошлось без кучи перепрошиваний OpenLRS, причем USB-UART переходник на 3.3 вольта я заказать забыл, так что пришлось вытравить самому (одна FT232RL обошлась в 3 раза дороже, чем готовое изделие оттуда, но зато плату сделал универсальную на 3.3 и 5 вольт). Разок uart уже не хватило — что-то случилось с бутлоадером — надо программатором перепрошивать, а мой только на 5 вольт. Ну, это тоже довольно просто победилось — благо программатор самодельный и на AtMega8.
Теперь у пульта есть обратная связь! Он пищит при потере пакетов. Отлетаю на ~150 метров — и раздается писк. Мда… Система для дальних полетов…
 Надо попробовать сделать антенны! Для аппаратуры я выбрал простейшие Vee-dipole антенны. И опять результат великолепный — за всё время с этими антеннами было попискивание только один раз, когда я залетел за ЛЭП. Дальность не мерил, но отлетал на 3км в сторону и 1км в высоту — сигнал был стабильный.
Надо попробовать сделать антенны! Для аппаратуры я выбрал простейшие Vee-dipole антенны. И опять результат великолепный — за всё время с этими антеннами было попискивание только один раз, когда я залетел за ЛЭП. Дальность не мерил, но отлетал на 3км в сторону и 1км в высоту — сигнал был стабильный.Высота нас зовёт
Над облаками пока не летал. Проблема, как оказалось не в том, чтобы туда взлететь, а в том, чтобы потом спуститься вниз! Квадрокоптер при спуске ведет себя не стабильно — и спускается не так уж быстро. А бросать его быстро вниз как-то стремно — вдруг на торможении что-нибудь не выдержит?
В общем пока личный рекорд — 1.1км. Это уже в слоисто-кучевых облаках, но не над ними.
Но цель конечно — высоко-кучевые облака! Проверю быстрые спуски — и можно будет пробовать!
Переделки, время полета и аварии
За всё это время ничего не переделывал (не считая расположения плат на устройстве). Только добавлял новое оборудование:
- FPV;
- Bluetooth;
- OSD;
- uBEC.
 Ну и конечно пропеллеры. Для начальных полетов у меня были 10х4.5. Сейчас стоят 12х4.7. И хочу заказать 15х4 карбоновые, но боюсь моторы могут не выдержать. Собираюсь в ближайшее время замерить ток, который потребляется сейчас — и на основе этого делать выводы.
Ну и конечно пропеллеры. Для начальных полетов у меня были 10х4.5. Сейчас стоят 12х4.7. И хочу заказать 15х4 карбоновые, но боюсь моторы могут не выдержать. Собираюсь в ближайшее время замерить ток, который потребляется сейчас — и на основе этого делать выводы.Тяга сейчас очень приличная, но всегда хочется больше. Вот попробовал подвесить зеркалку (900 грамм). Запас тяги ещё есть!
Ну и конечно хочется увеличить время полета.
Время отрыва от земли
С купленными вначале батареями на 2650 mAh время полета с увеличением веса стало уменьшаться. Решил попробовать подсоединить обе батареи параллельно. Время полета 14 минут. Отлично. Если просто висеть, то и того больше. Заказал 2 батареи по 5000 mAh. С каждой по 15 минут лета (одна батарея легче, чем 2 по 2650) + ещё 14 на спаренных старых. Пока достаточно, но ещё есть куда стремиться.
Houston we have a problem
Пока падение было только одно:
Не очень сильное. В принципе, всё описание внутри видео. Для тех, кто не хочет/не может посмотреть короткое описание: я не послушал умных дядек и не поставил самозатягивающиеся хомуты на пропеллеры (ну а чё, они и так хорошо держатся). Вот один из них и раскрутился — и стал проворачиваться на оси мотора.
Было пару моментов, когда думал, что всё — сейчас разобью. Например ещё без FPV взлетел метров на 150. Квадрокоптер уже плохо видно, gps тогда ещё как-то непонятно работал. Его стало уносить — а я даже не понимаю, где у него перед. Абсолютно непонятно, куда он наклоняется! Но, с горем пополам, прилетел на место. Сердце бьется, руки вспотели — я же ещё и в городе умудрился так сделать! Но хорошо то, что хорошо кончается.
Вместо заключения
Очень доволен своей игрушкой. Доставляет массу удовольствий. В населенных местах вызывает огромное волнение:
Что в общем-то приятно.
На данный момент в планах:
- как уже говорил ещё большие пропеллеры;
- хорошая система стабилизации камеры (я собрал одну, но у меня были очень низкокачественные сервы, из за которых терялся весь её смысл);
- возможно очки для FPV;
- ну и хочу зеркалку поднять и сделать пару качественных фото (пока состоялся только тестовый полет метров на 15).
Как обычно у меня ничего конкретного в статье, а одни рассказы. Строго не судите.
Задавайте любые вопросы — отвечу как смогу.
Спасибо тем, кто дочитал до конца.
PS: пожалуйста, не надо говорить, что собрать из готового — это ерунда, надо делать своё. Я придерживаюсь другого мнения: нет смысла самому травить плату, если только комплектующие обойдутся дороже, чем она же готовая. И софт самому писать с нуля смысла мало. Я лучше потрачу время на помощь проекту MultiWii — незачем в таком деле изобретать велосипед. А вот после сотни полезных коммитов возможно и можно будет начать что-то свое.
