
15 мая на Робостанции прошел этап отбора к всемирной олимпиаде по робототехникие для школьников. Кроме того в мире существует еще ряд подобных соревнований для различных роботов. Об одном из них и пойдет речь.
MATE ROV пожалуй одно из сложнейших мировых соревнований по робототехнике – оно спонсируется NASA и посвящено подводным роботам, создавать которые невероятно трудно. Например сейчас в кинотеатрах выходить фильм «Жизнь Робота» — он посвящен истории победителей этого чемпионата 2004 года.
Подготовка к такому чемпионату и создание своего робота для него занимает месяцы и порой бывает интереснее самого чемпионата, но часто остается за кадром. Мы решили приоткрыть завесу над этой области робототехники и теперь будем регулярно вести дневники разработчиков одной команды, твердо решившей взять золото на следующем чемпионате.
Их робот будет презентован на робостанции, а команда конструкторов проведет мастер-класс по подводным роботам в Робошколе. А пока можно подсмотреть за процессом его рождения в лаборатории.
Наша команда носит гордое имя Bauman Gidronav. В прошлом году мы отлично съездили на чемпионат MATE ROV, (позже запостим отчет). В этом году у нас случилась заминка и организаторы решили не идти нам на встречу перенеся наше участие на июнь 2016 года. Тем самым подписав себе смертный приговор, потому что если мы за пару месяцев взяли второе место то за год мы допилим робота уровня военного уровня. Вот наш красавец:

Обратите внимание на необычные винты.
Вот ради него мы и решили завести на Хабре еженедельные дневники разработчиков – что бы под взором общественности не было соблазна все забросить и делать спустя рукава. Плюс мы планируем привезти своего робота на робостанцию и прочитать о нем лекцию всем желающим. Надеемся наш опыт и советы помогут фанатам DIY по всей стране. Сегодня поговорим о винтах и электронике.
Итак, начнем с теории. Все видели как прячут винты подводных лодок. Что же они скрывают?

Винт АПЛ Ясень еще секретен.
Вообще все винты подлодок секретны, поскольку по одной-двум фоткам можно реконструировать звуковой след подлодки и легко найти её в океане шумов. Все фотографии винтов подлодок в интернете это чье-то грубое нарушение режима секретности. Может их и в интернете публиковать нельзя, но мы рискнем.
Винт – главный узел в морской инженерии. Его изучение и проектирование это столь трудоемкая задача, что у нас есть отдельный «НИИ Гребных винтов» — ЦИИ Крылова. Но при этом все наши знания о винтах чисто эмпирические. Не существует никакой математической теории описывающей идеальный винт – есть только формулы аэродинамики и старый добрый эксперимент.
Фактически здесь морской инженер действует как артиллерист с баллистическими таблицами – просто выбирая подходящую модель уже готового винта. Главное в винтах это эффективность и уровень шума. Гражданским важна тяга, военным – тишина, и всем – маневренность. По этому у современных подлодок такие тонкие изогнутые винты – это математически рассчитанная форма для снижения эффектов т.н. кавитации.

Винт ПЛ «Санкт-Петербург» проекта 677 «LADA»
Но можно пойти и по другому пути – если винту добавить кожух то выйдет своего рода турбина и можно будет на выбор увеличить тягу или сильно снизить уровень шума.

АПЛ класса Лос-Анджелес с ободом винта.
Но если вам действительно нужен турбированный винт, вы обратите внимание на детище советского инженерного гения.

ПЛ «Алроса» с экспериментальным водометным движителем. Из-за рекордной тишины хода в НАТО подлодка получила имя «Черная дыра».

Внутри водомет — по сути та же турбина.
То же справедливо и для гидронавтики в целом – на до звуковых скоростях у нас одни формулы с обычной аэронавтикой. Обе науки берут начало в старой «баллистике» — так называлась наука из которой произошла физика, химия да и получается, что и гидронавтика тоже. И эта наука любит отбрасывать все лишнее, по этому на свет родился третий тип винта.

В 2010 году немцы представили Rim-driven thruster — совершенно новое поколение вентильных/бесколлекторных двигателей лишенное всех недостатков привычным нам осевых девайсов. Идея их не нова для теоретиков, но вот практическая реализация всегда упиралась в отсутствие достаточно мощной электроники.
Преимущество таких устройств очевидно:
- Двигатель и винт представляют одно устройство, что экономит место и упрощает конструкцию. В нем нечему ломаться.
- Одинаковая тяга в обоих направлениях.
- Сверхманёвренность.
- Полная тишина.
- И главное — его невозможно заклинить. Водоросли в винтах — основная проблема подводных роботов — теперь в прошлом.
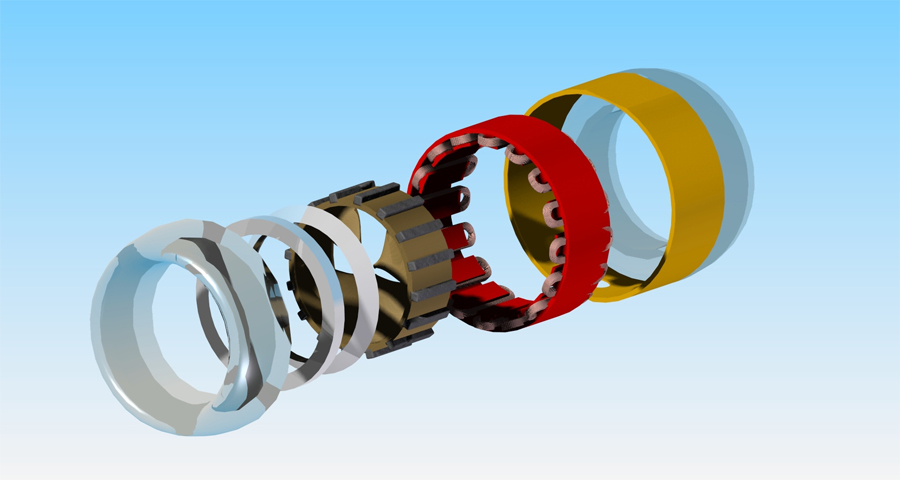
А вот недостатки не столь очевидны:
- Сложная конструкция. Реально сложно собрать ее в гараже.
- Требует особо надежных высоковольтных транзисторов.
- Пока только для малых глубин, для реальных подлодок не достать надежных транзисторов.
- Сопротивление обода потоку воды снижает мощность в полтора раза.
Не сложно видеть, что такие винты идеально подходят для подводных роботов, особенно если у вас есть доступ к приличной электронике. Но мы решили не рисковать со сложной конструкцией и к винтам просто подвели трос от обычного внешнего двигателя. Пойти на это пришлось как раз после прошлого чемпионата. Слишком тугая компоновка робота понизила маневренность — струи двигателя перекрывались и втыкались в корпус. От этого страдала и скорость и точность и управляемость.
Двигатели конструктивно разделены с винтами, что позволило радикально упростить конструкцию.
Собственно новый аппарат имеет две передние камеры, четыре горизонтальных винтомоторов, четыре вертикальных. На фото макет как он был показан в Сколково, однако с тех пор многое поменялось. После той выставки мы уже приступили к нормальной сборке аппарата. Первым делом конечно испытывали герметичность отдельных частей аппарата. Так, например, проходило испытание герметичности прочного корпуса электроники.
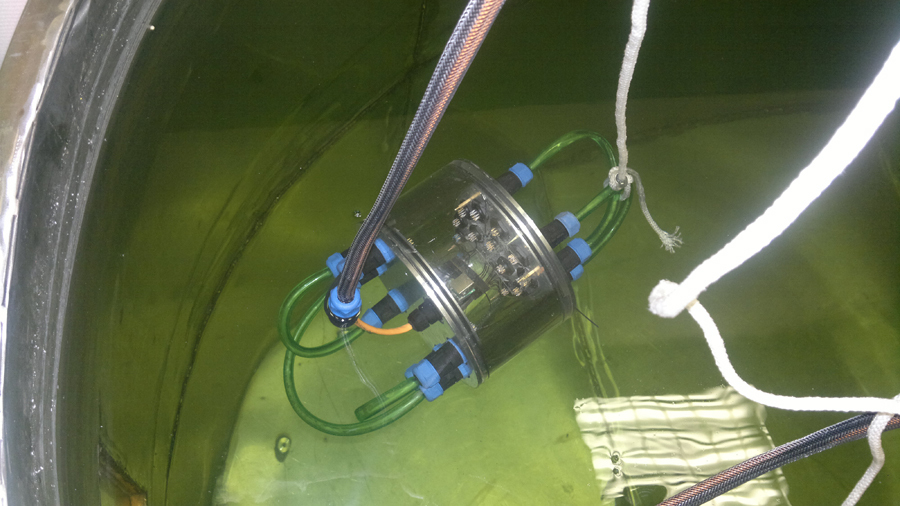
Формально это и есть корпус нашего робота.
В этот раз мы решили все сделать как надо и перешли на технологии, которые нам нравятся. Первым делом поставили нормальные цифровые стереоскопические камеры. В прошлый раз камеры были аналоговые и передавали сигнал по одной дифференциальной паре в непонятном китайском формате через два китайских нонеймовских преобразователя PAL в дифференциальную форму. Короче костыли, от которых очень хотелось отказаться.
А раз камеры, значит к ним компьютер и к нему нормальный канал гигабитный. А если уж электронику делать как надо, то и в остальном не срезать углы, а сразу делать как надо. Отсюда просторная конструкция и винты с внешним зацеплением лопастей. Кстати в русском языке нет еще названия этим винтам и вроде мы первые, кто использует их на гражданских проектах. Мы называем их хаблос, потому что гугл называет такие винты hables propeller, но в лаборатории за ним уже крепко утвердилось прозвище «дырявый» винт.
Электроники стало меньше и корпус робота удалось сделать меньше. Новые моторы — меньше и мощнее. Кстати с моторами не обошлось и без читов.

Наши полтора киловатта.
Питание для всех моторов — пришлось взять военные ИП ибо все остальные не выдерживают и горят. Но Ирибис сжечь невозможно, это ИМХО самые надежные блоки в мире, ну из тех что можно купить легально. Если решите собирать робота — берите только их.

А вот так выглядит блок электроники в сборе, ну почти в сборе.
Главное новшество — появление центрального компьютера. Полноценная ось и проц тянут все, да и атом последнего поколения приятно удивил — работает быстрее моего ноутбука. Способен компилироваться, отваживаться прямо на себе и одновременно захватывать пять камер, обрабатывать их и передавать на берег. И все это время еще и полноценно управлять роботом.
На нем в разы легче писать программы особенно в области искусственного интеллекта. Многоядерность опять же подспорье. Компьютер берет на себя такие программы как выход в точку работы, возврат на корабль, следование за кораблем или следование за целью. Эти программы тоже очень важны, т.к. в реальной жизни робот в море опускается на рабочую глубину часа два — было бы обидно платить за это время пилотам.
Но главная фича от появления компьютера — возможность перепрошивать главный контроллер в горячем режиме. Это очень важно, поскольку основные программы системы управления роботом обитают именно в нем, то есть все те, что требуют очень жесткого реального времени. Софт занимается осуществляет связь с берегом и работой с камерами, в основном через модуль измерения методом оптического дальномера — поскольку это единственный способ померять что-то под водой. Лазеры не эффективны, а рулетку на дне не достанешь. Все меряется через стереоскопическое зрение.

Логически блок поделен на две части: блок обработки видео и блок управления аппаратом. Блок обработки видео — это одноплатный компьютер на базе четырёх ядерного Intel Atom, который занимается захватом видео с камер и передачей его через Ethernet на берег. Блок управления аппаратом – это микроконтроллер stm32 в операционной системой FreeRTOS, который производит уже управление всем аппаратом, отвечает за системы стабилизации.
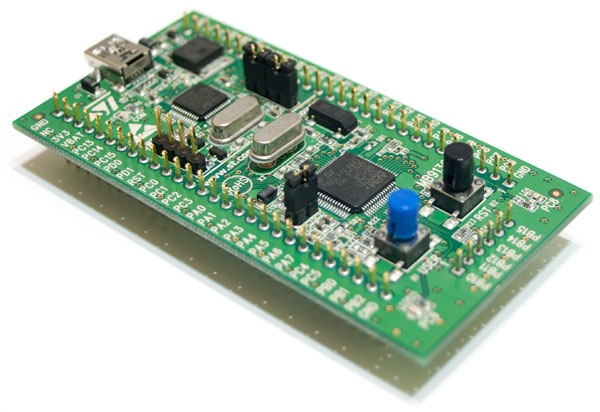
STM32 — сердце нашего робота.
Данные с берега он получает от одноплатный компьютер через USART. Связь с берегом – гигабитный Ethernet, однако в действительности максимум получается всего лишь порядка 750Мбит/с, но этого хватает. Помимо фронтальных камер аппарат имеет ещё 3 осмотровых: слева, справа и сзади. Также блок электроники может осуществлять управление до шести различными устройствами посредством ШИМа. Это свет, управление наклоном фронтовых камер, два схвата и два дополнительных приспособлений. Стоит отметить, что вся бортовая электроника гальванически полностью развязана с береговой частью.
Однако всё оказалось не так просто. Например, наш одноплатный компьютер, сделанный на Тайване не всегда успешно инициализирует контроллер физики Ethernet, от чего пришлось заменить его на спаренный USB 3.0 хаб с Gigabit Ethernet преобразователем. Спасло конечно то, что у USB 3.0 очень хорошая скорость передачи данных, что позволяет захватывать видео одновременно с двух высококачественных камер и передавать его на берег. Не хочу сказать ничего плохого про Тайваньских производителей, но они были сами удивлены данной неисправностью, когда узнали об этом.
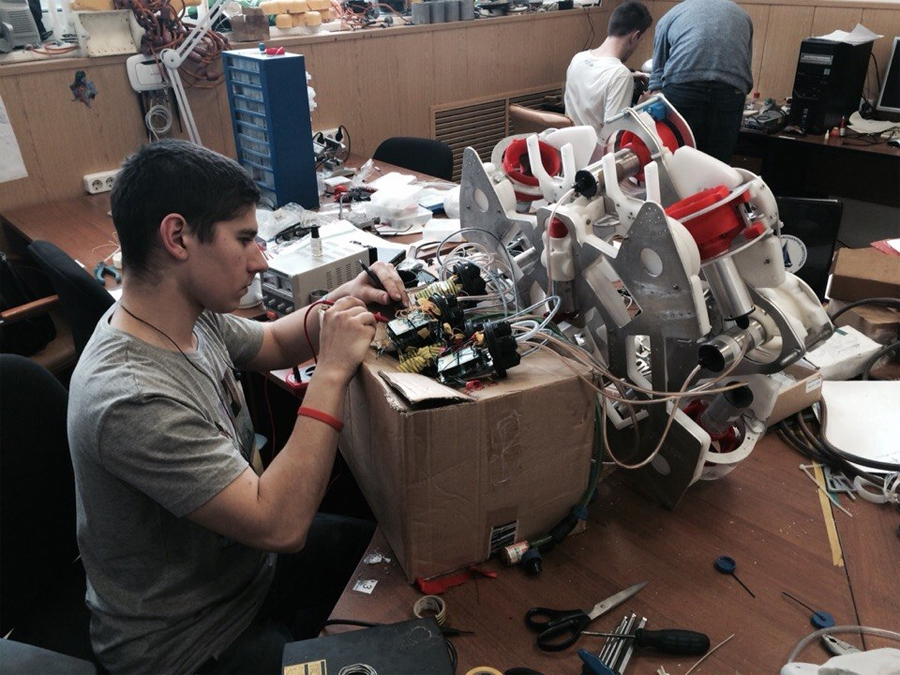
А вот так выглядит процесс сборки. На фото четыре модуля драйверов, соединяющихся по RS485 между собой и с главным контроллером.
Также был переделан пульт управления аппаратом. Поставлен дополнительный сенсорный монитор с большей диагональю и компьютер по мощнее для обработки видео, поступающего с аппарата.

После довольно интересного и длительного процесса сборки, сопровождавшегося множеством багов, мы наконец кое как поплыли.

На данном этапе мы всё ещё имеем довольно длительный перечень работ. Например, надо всё-таки доделать планируемые винтомоторы, отладить систему стабилизации, подключить обе фронтальные камеры, так как сейчас используется только одна.
На этом пока всё, стей тюнед. Манипуляторы и система управления — в следующем посте.
PS
Если вы увлекаетесь или просто интересуетесь DIY инженерией — обязательно приходите в Робошколу, это сейчас единственное место в Москве где столько энтузиастов собирают своих роботов и делятся опытом под присмотром инженеров-робототехников.
