Всего один день понадобился разработчикам подводного робота OpenROV, чтобы собрать через Kickstarter необходимые им $20 тыс. для начала производства конструктора.
В этом нет ничего удивительного: проект действительно уникальный. Только представьте: любой желающий может купить набор комплектующих и собрать собственную подводную лодку. Как вариант, детали можно выточить самому, схема сборки и чертежи опубликованы в свободном доступе: детали, софт на github.

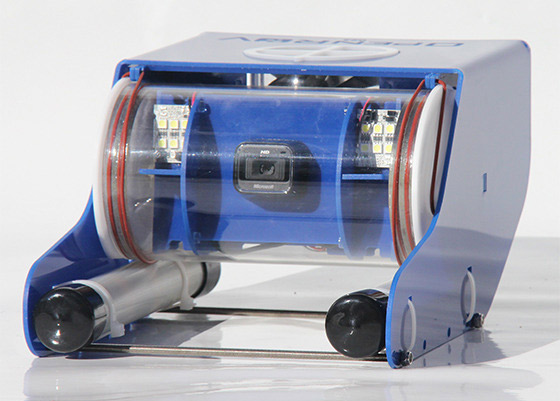
Маленькая подводная лодка OpenROV имеет размер 30 х 20 х 15 см, весит примерно 2,5 кг и способна опускаться на глубину до 100 метров. Аккумуляторов хватает на 1-1,5 часа работы.
Вся электроника упрятана во влагостойкий корпус в центре робота. Устройство приводится в движение тремя моторами 800kv: два в горизонтальной плоскости и один в вертикальной.


OpenROV на Kickstarter
Набор для сборки со всей электроникой и моторами можно предварительно заказать за $725, готового робота в сборе — за $1200. За скромную сумму $220 продаётся комплект деталей для корпуса и шасси, без электроники и моторов. Начало продаж конструктора ожидается в сентябре, готовых роботов — в ноябре.

В этом нет ничего удивительного: проект действительно уникальный. Только представьте: любой желающий может купить набор комплектующих и собрать собственную подводную лодку. Как вариант, детали можно выточить самому, схема сборки и чертежи опубликованы в свободном доступе: детали, софт на github.

Маленькая подводная лодка OpenROV имеет размер 30 х 20 х 15 см, весит примерно 2,5 кг и способна опускаться на глубину до 100 метров. Аккумуляторов хватает на 1-1,5 часа работы.
Вся электроника упрятана во влагостойкий корпус в центре робота. Устройство приводится в движение тремя моторами 800kv: два в горизонтальной плоскости и один в вертикальной.


OpenROV на Kickstarter
Набор для сборки со всей электроникой и моторами можно предварительно заказать за $725, готового робота в сборе — за $1200. За скромную сумму $220 продаётся комплект деталей для корпуса и шасси, без электроники и моторов. Начало продаж конструктора ожидается в сентябре, готовых роботов — в ноябре.
