Помнится, на меня произвел огромное впечатление фильм «Терминатор-2», именно эта часть. Особенно нравились кадры, где модель Т800 анализировала мир (тот же момент с отниманием одежды и мотоцикла, например). Оказывается, в наше время ситуация ненамного отличается и в случае с реальными роботами (правда, не таких совершенных, как Т800, само собой). На днях попалось на глаза видео с презентацией «видения мира» роботами-автомобилями корпорации Google.
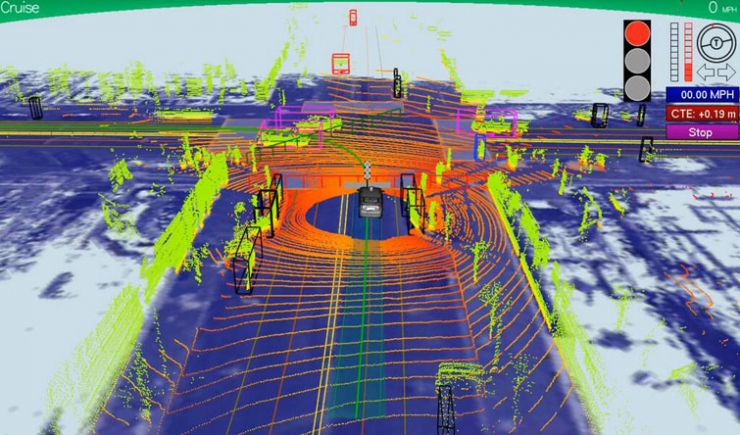
Эти автомобили используют для анализа окружающей среды огромное количество сенсоров, включая лазеры, радары и прочее. Отдельно стоит отметить, что автомобиль собирает около гигабайта данных в секунду, само собой, анализируя эту информацию, причем достаточно быстро. При появлении препятствия автомобиль реагирует практически моментально, что говорит о высокой скорости работы системы управления авто.
Вот само видео с демонстрацией работы системы:
А вот более подробная презентация:
Via Bill_Gross + Dvice
