Вступление
Отступление
С последней написанной мною статьи прошло уже довольно много времени, за что прошу прощения: ЕГЭ, поступление, начало учебы. Теперь же, когда до сессии еще далеко, а учебный процесс уже отнимает не так много времени, я могу продолжить писать статьи об освоении нашего К1986ВЕ92QI.
План работы
В комментариях к предыдущим статьям меня просили осветить не только работу с микроконтроллером через настройку регистров, но и с использованием SPL (Универсальной библиотеки для авто настройки периферии.). Когда мы только начинали, я не стал этого делать, ибо соблазн использовать SPL вместо ручной настройки по средствам CMSIS был бы велик, и вы бы, очень вероятно, вопреки здравому смыслу, начали бы использовать SPL везде, где только можно было бы. Сейчас же, научившись работе с некоторыми блоками периферии вручную, мы можем коснуться SPL и сравнить КПД обоих подходов в реальной задачи.
Цель
В качестве учебной цели, давайте помигаем светодиодом по средствам ШИМ-а (Широтно-импульсной модуляции.), при этом регулируя кнопками его частоту. Кнопки так же будем опрашивать в прерывании, вызванного другим таймером, а в момент опроса — будем инвертировать состояние второго светодиода. В реализации данной задачи нам понадобится:
1. Настроить вывод порта ввода-вывода, подключенного к светодиоду, для ручного управления. Этим светодиодом будем показывать, что мы зашли в прерывание и опросили кнопки.
2. Настроить вывод порта ввода-вывода, подключенного ко второму светодиоду, в режим управления от таймера. Именно сюда будет подаваться ШИМ сигнал от первого таймера.
3. Настроить первый таймер в режим подачи ШИМ сигнала на второй светодиод.
4. Настроить таймер для вызова прерывания, в котором мы будем опрашивать клавиши.
5. Разрешить использование прерываний на уровне таймера (по конкретному событию) и на уровне общей таблице векторов прерываний от второго таймера в целом.
Ручная настройка
Таймер 1. Реализация ШИМ
С работой таймера мы уже сталкивались в этой статье. Но в тот раз у нас были совсем другие цели и нынешняя настройка немного сложнее той, что была описана в приведенной выше статье.
Начнем.
- Для начала создадим пустую оболочку функции, которая будет инициализировать таймер. На вход она должна принимать какое-то значение, характеризующее скорость ШИМ. У нее может быть абсолютно любое имя.
Например, такое.// Инициализация таймера в режиме ШИМ для работы со светодиодом. void initTimerPWMled (uint32_t PWM_speed) { } - Далее стоит вспомнить структуру таймера.
Структура таймера.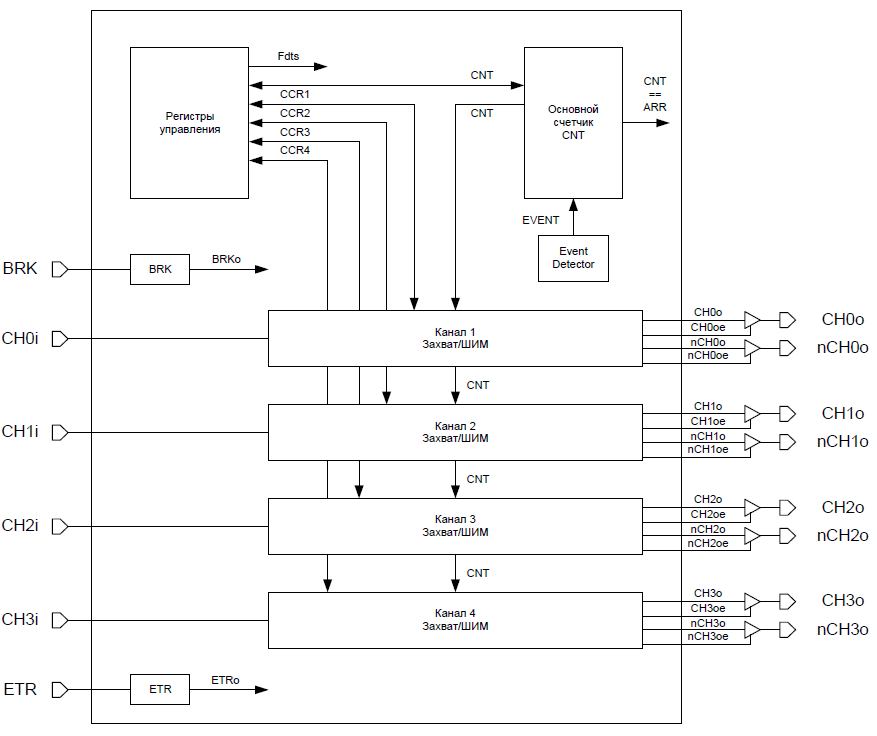
Структура у всех трех таймеров нашего микроконтроллера одна и та же. Каждый таймер имеет 4 канала, каждый из которых позволяет работать в режиме «захвата» и ШИМ. Нас интересует последний. Так же у каждого канала есть выходы. Причем 2: «прямой» и инвертированный. Нас интересует «прямой». В качестве выхода для выдачи сигнала ШИМ — будем использовать вывод первого канала первого таймера. Перед тем как перейти к регистрам — выделим основную задачу: наша цель, чтобы подождав некоторое время, таймер сам менял состояние на своем выходе циклично. - Прежде чем мы начнем настраивать таймер — нам нужно настроить вывод порта ввода-вывода на работу с таймером. О том, как настраивать выводы портов ввода-вывода я рассказывал очень подробно тут.
Мы решили использовать прямой выход первого канала первого таймера.
Выводы имеют следующие имена.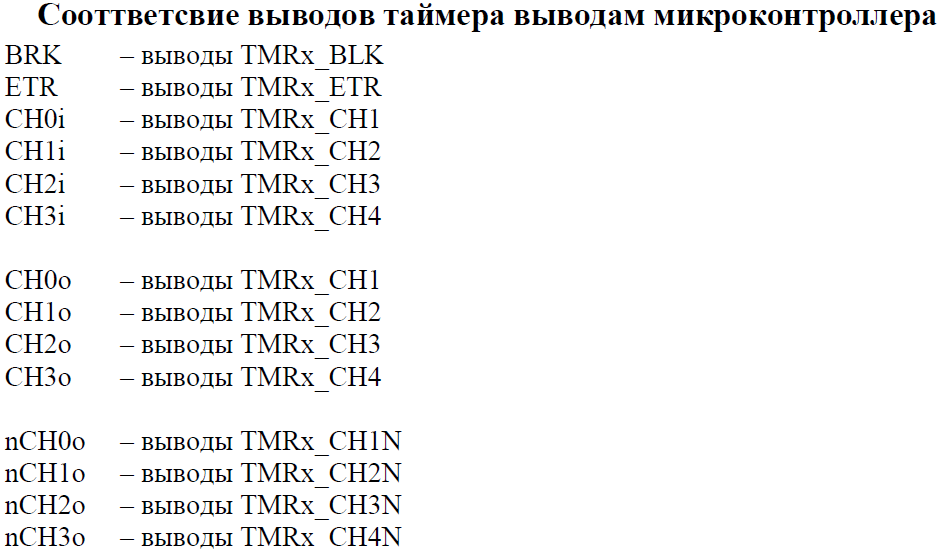
Следовательно, нам нужен канал TMR1_CH1.
Находим его.Как мы видим, он подключен альтернативной функцией к каналу PA1. Не смотря на то, что есть еще выводы, которые подключены к TMR1_CH1, мы будем использовать именно PA1.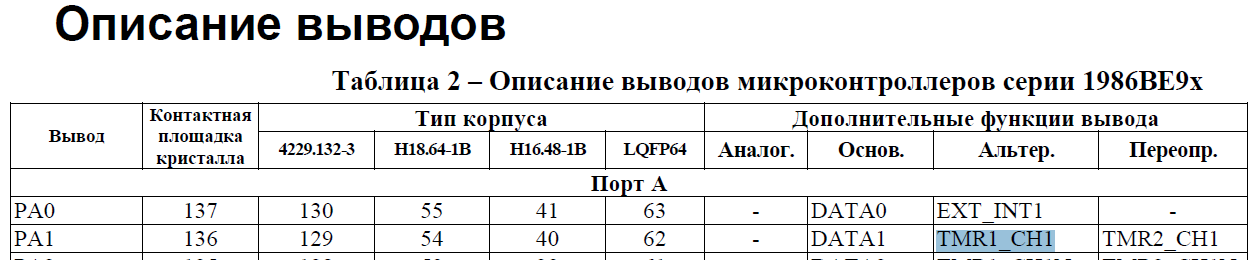
Для этого нам нужно подать тактирование на порт (а заодно и на таймер 1) и перевести вывод в режим альтернативной функции.MDR_RST_CLK->PER_CLOCK |= RST_CLK_PCLK_TIMER1|RST_CLK_PCLK_PORTA; // Включаем таймер и тактирование порта A. MDR_PORTA->OE |= (1<<1); // Выход. MDR_PORTA->FUNC |= (2<<(1*2)); // Режим работы - альтернативная функция. MDR_PORTA->ANALOG |= (1<<1); // Цифровые. MDR_PORTA->PWR |= (3<<(1*2)); // Максимальная скорость пин обоих светодиодов. - Далее нам нужно разрешить подачу тактового сигнала на сам таймер (включить мы его уже включили, а вот подать сигнал, с которого он и будет считать — не подали). Для этого есть регистр MDR_RST_CLK->TIM_CLOCK.TIM_CLOCKТут нам нужно лишь подать тактирование на таймер.
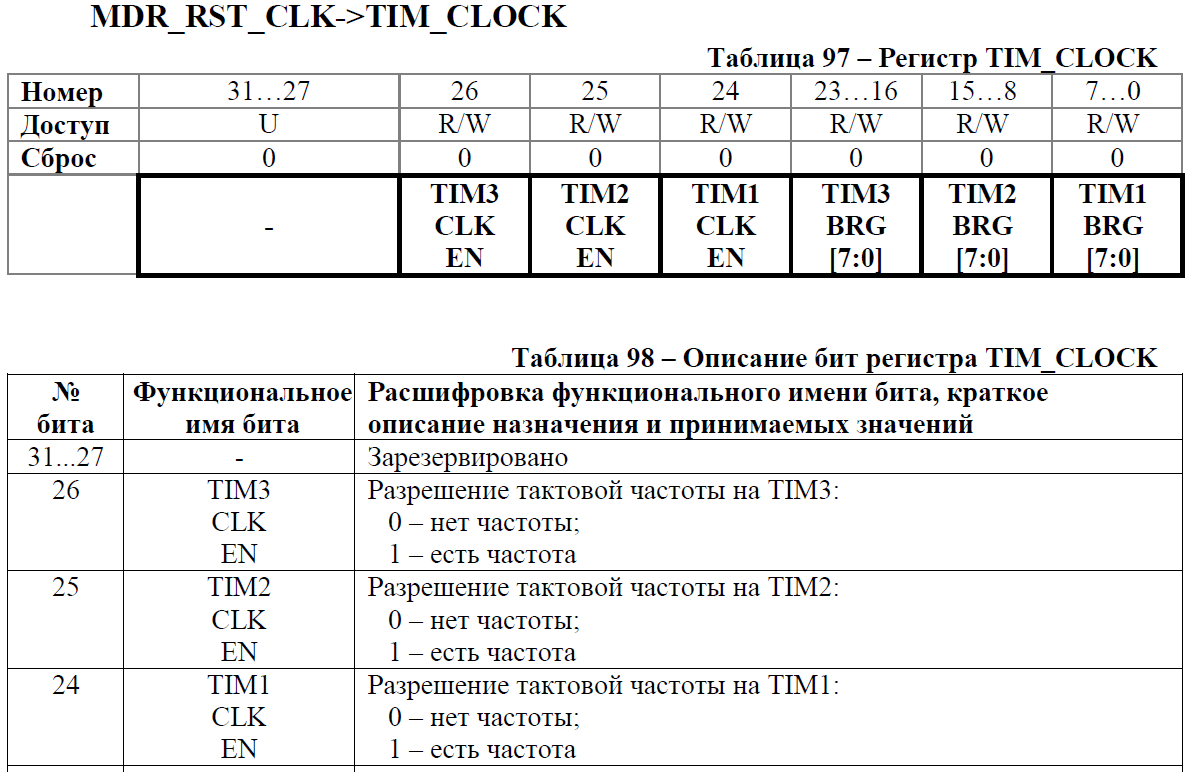
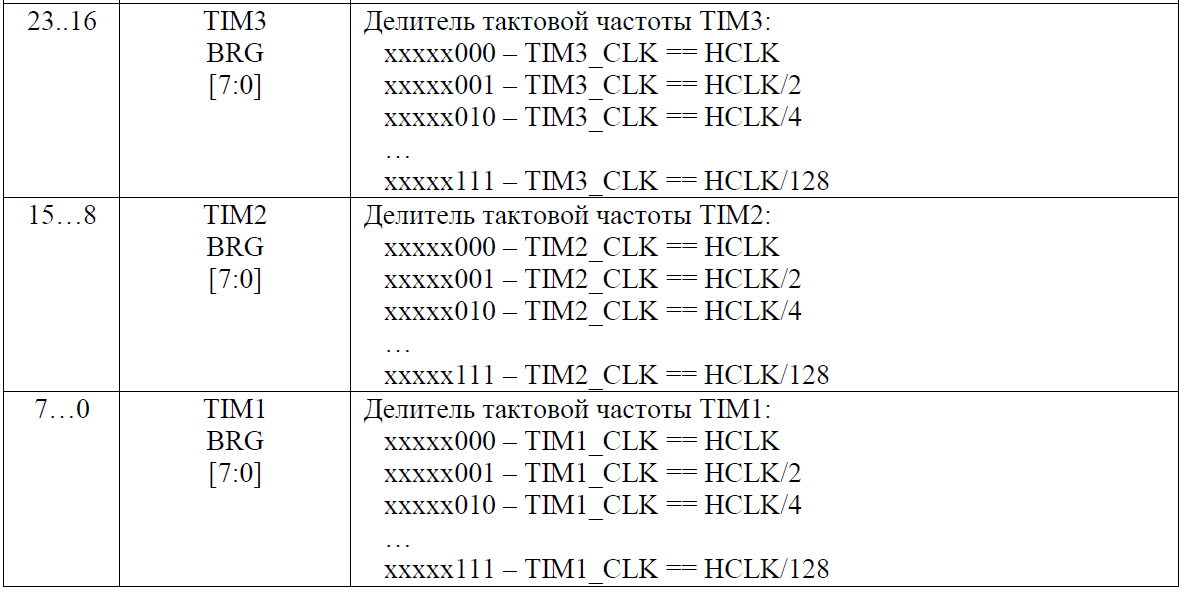
MDR_RST_CLK->TIM_CLOCK |= RST_CLK_TIM_CLOCK_TIM1_CLK_EN; // Подаем тактирование без предделителя. - А теперь — регистры самого таймера. Несмотря на то, что у таймера очень много регистров — большинство из них копируют друг друга, так как структура регистров управления для каждого канала — одна и та же. Для начала рассмотрим регистры всего таймера, а потом для конкретного канала.
- Регистр CNT можно назвать основой. Именно значение в нем сравнивается с «эталонным» и в случае совпадения происходит какое-либо действие. Именно с него таймер начинает считать.
В нашем случае достаточно, чтобы он был равен нулю. Несмотря на то, что он при включении и так должен был быть равен нулю, на всякий случай лучше сбросить его, т.к. возможно, что после программной перезагрузки значение в нем будет не ноль.
CNT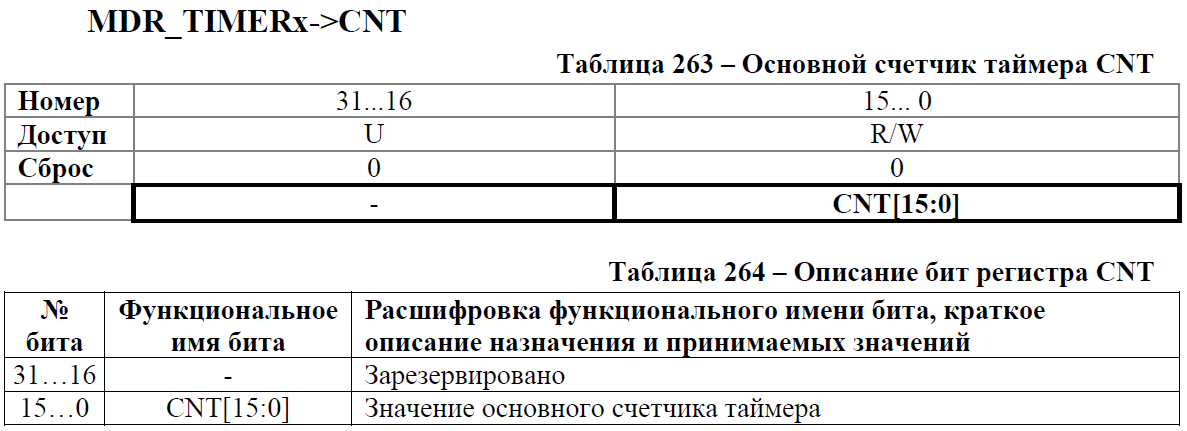
MDR_TIMER1->CNT = 0; // Считай с 0. - PSG. Данный регистр отвечает за деление входного сигнала. В нашем случае на вход таймера подается 8000000 импульсов в секунду (т.к. по умолчанию частота контроллера 8 МГц = 8000000 Гц), а делители перед таймером мы не использовали. Как видно из описания, от того делителя, который мы выберем, нужно отнять 1 и это число положить в регистр. Т.к. мы планируем менять частоту ШИМ в приделах от 0.5 Гц до 250 Гц (От медленного мигания раз в 2 секунды, до неразличимого человеческим глазом мельканием, похожим на тусклое горение), то подходящим делителем может быть 32000. Это число входит в диапазон 16-ти битного числа. Таким образом, каждые 32000 тиков в CNT будет пробавляться/убавляться (в зависимости от настройки) единица.
PSG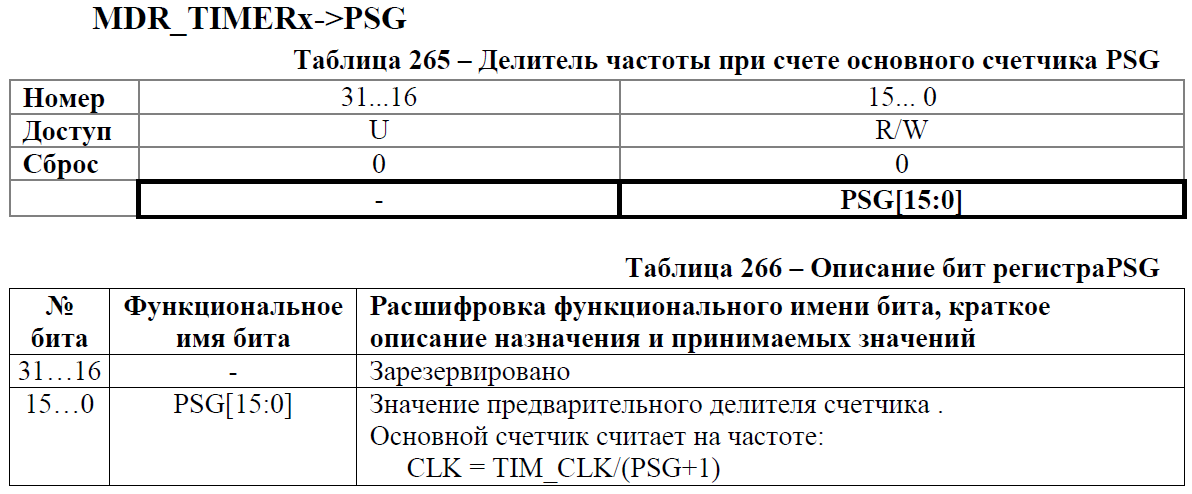
MDR_TIMER1->PSG = 32000-1; // На таймер идет частота TIM_CLK/32000. - ARR. Именно с этим числом будет сравниваться число в CNT. Так как у нас 250 тиков — это одна секунда, то выберем половину этого времени, чтобы за секунду светодиод успел поменять свое состояние дважды. Именно это число мы укажем при вызове функции инициализации таймера.ARR
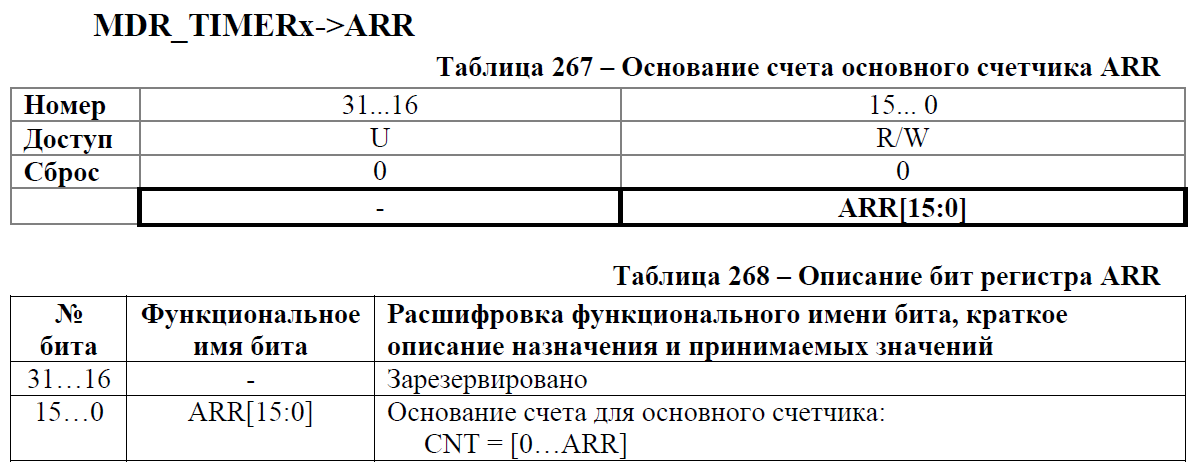
MDR_TIMER1->ARR = PWM_speed; // 1 секунда 250 тиков. У нас частота 2 герца. - С общими настройками таймера разобрались. Можно приниматься за настройку сигнала для выхода. Для каждого канала можно настроить свой сигнал. В нашем случае (для первого канала), служит регистр CH1_CNTRL. Как мы условились выше, у нас на выходе всегда должен быть какой-то сигнал. Либо «0» — либо «1». «Мертвая зона» нам не нужна. И нам нужно, чтобы и «0» и «1» были равные промежутки времени. Для этих целей есть сигнал REF. Он может быть либо «1», либо «0». Так же мы можем менять его значения всякий раз, когда CNT == ARR. Для этого нам нужно в ячейку OCCM записать 0x03 (0b011). Все остальные параметры нас устраивают и по умолчанию.
CH1_CNTRL
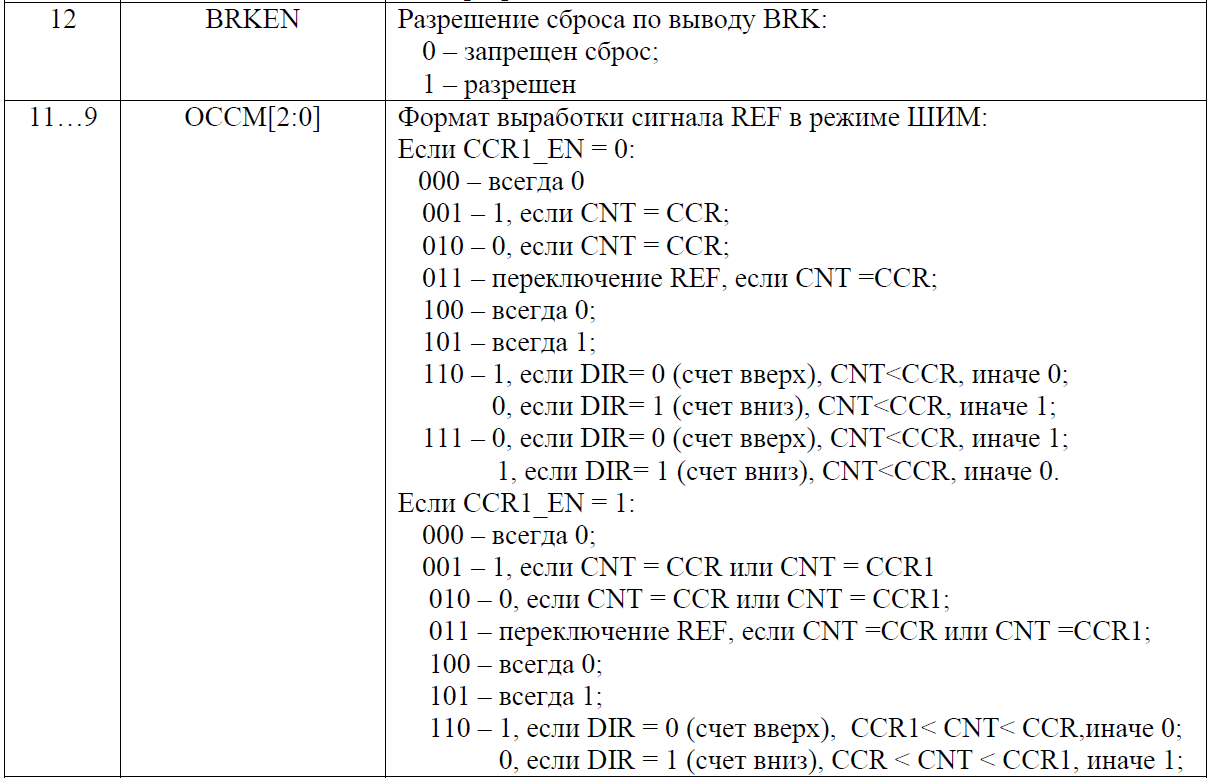

MDR_TIMER1->CH1_CNTRL = 3<<TIMER_CH_CNTRL_OCCM_Pos; // Переключение REF, если CNT = CCR; - Теперь нам нужно настроить выход канала. Мы договорились использовать первый. Тут нам понадобится регистр CH1_CNTRL1. Мы уже сформировали сигнал REF. Теперь нам нужно лишь настроить «прямой» вывод на выход и подать на него REF. Важно не перепутать группы бит SELO и SELOE. SELO выбирает, какой сигнал идет на вывод, а SELOE выбирает, будет ли вывод являться выходом или нет.CH1_CNTRL1
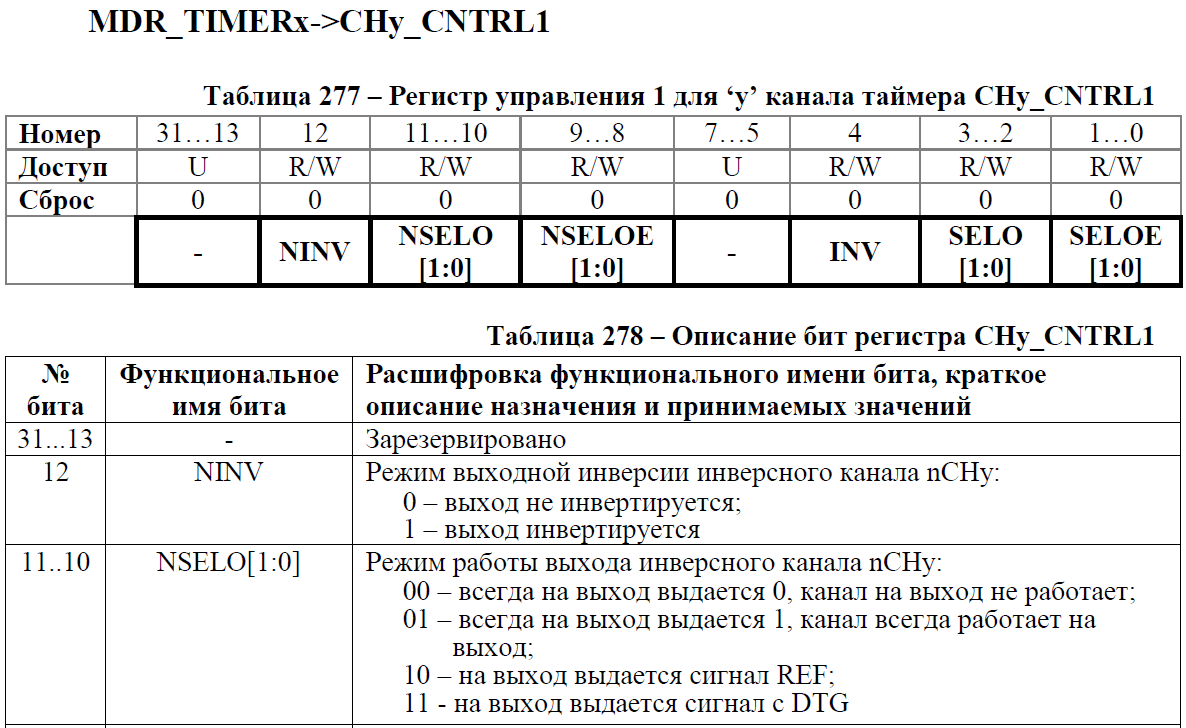
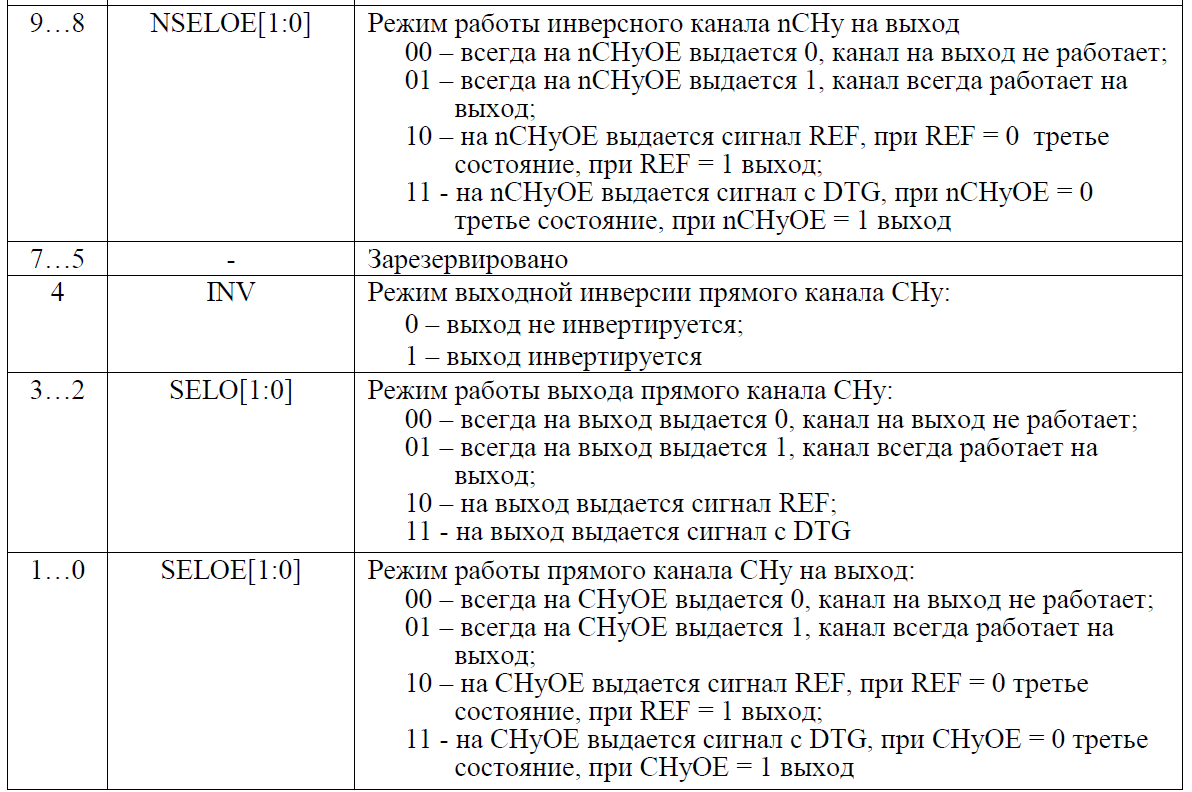
MDR_TIMER1->CH1_CNTRL1 = (2<<TIMER_CH_CNTRL1_SELO_Pos) // На выход выдается сигнал c REF. | (1<<TIMER_CH_CNTRL1_SELOE_Pos); // Канал всегда работает на выход. - Теперь нам осталось лишь включить таймер в центральном регистре (я намеренно не рассматривал его ранее, так как его нужно использовать лишь по окончании настройки всего таймера).CNTRL
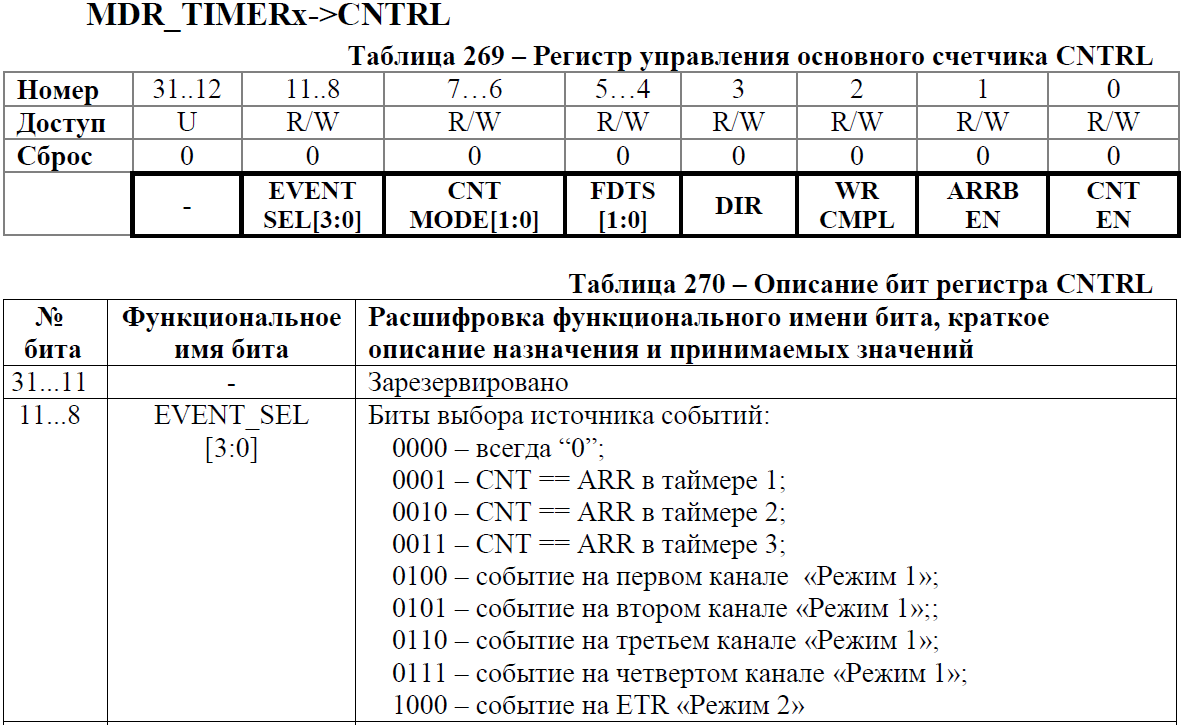


MDR_TIMER1->CNTRL = TIMER_CNTRL_CNT_EN; // Включаем таймер. - В итоге мы получаем работающую функцию, инициализирующую таймер в режиме ШИМ и вывод, на котором и происходят колебания логических уровней.Итоговая функция инициализации TIMER1
// Инициализация таймера в режиме ШИМ для работы со светодиодом. void initTimerPWMled (uint32_t PWM_speed) { MDR_RST_CLK->PER_CLOCK |= RST_CLK_PCLK_TIMER1|RST_CLK_PCLK_PORTA; // Включаем таймер и тактирование порта A. MDR_RST_CLK->TIM_CLOCK |= RST_CLK_TIM_CLOCK_TIM1_CLK_EN; // Подаем тактирование без предделителя. MDR_PORTA->OE |= (1<<1); // Выход. MDR_PORTA->FUNC |= (2<<(1*2)); // Режим работы - альтернативная функция. MDR_PORTA->ANALOG |= (1<<1); // Цифровые. MDR_PORTA->PWR |= (3<<(1*2)); // Максимальная скорость пин обоих светодиодов. MDR_TIMER1->CNT = 0; // Считай с 0. MDR_TIMER1->PSG = 32000-1; // На таймер идет частота TIM_CLK/32000. MDR_TIMER1->ARR = PWM_speed; // 1 секунда 250 тиков. У нас частота 2 герца. MDR_TIMER1->CH1_CNTRL = 3<<TIMER_CH_CNTRL_OCCM_Pos; // Переключение REF, если CNT = CCR; MDR_TIMER1->CH1_CNTRL1 = (2<<TIMER_CH_CNTRL1_SELO_Pos) // На выход выдается сигнал c REF. | (1<<TIMER_CH_CNTRL1_SELOE_Pos); // Канал всегда работает на выход. MDR_TIMER1->CNTRL = TIMER_CNTRL_CNT_EN; // Включаем таймер. }
- Регистр CNT можно назвать основой. Именно значение в нем сравнивается с «эталонным» и в случае совпадения происходит какое-либо действие. Именно с него таймер начинает считать.
Таймер 2. Вызов прерываний для опроса клавиш, изменение частоты ШИМ.
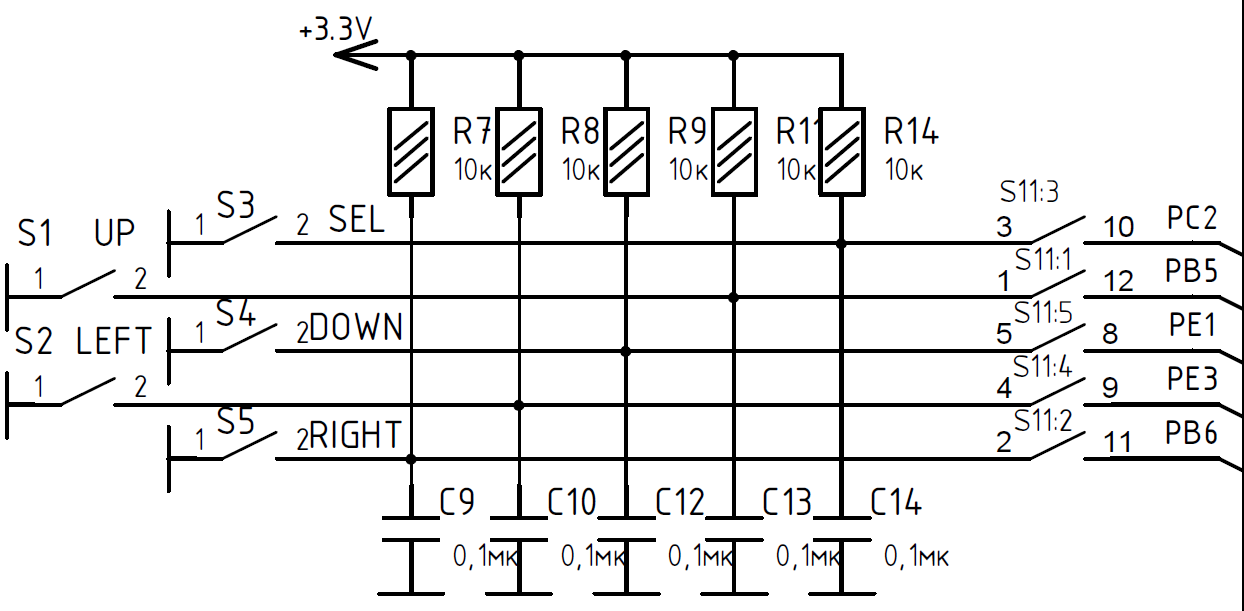
Теперь перед нами стоит задача проверить, нажата ли какая-либо клавиша и на основании нажатия изменить частоту нашего ШИМ-а. Опрашивать клавиатуру мы будем 25 раз в секунду и без проверки отпущенного нажатия. Это даст нам возможность делать большей разбег параметра ШИМ-а при нажатии.- Прежде чем настраивать таймер, настроим выводы для всех клавиш, что есть на нашей отладочной плате.Подключены они следующем образом.Как мы можем видеть, клавиши подключены к трем различным портам. Следовательно, нам нужно настроить все три порта. Замечу, что подтяжка и конденсаторная защита от дребезга уже присутствует на плате и включать внутреннюю подтяжку не нужно. С настройкой портов мы сталкивались неоднократно.
 Конечный код инициализации будет выглядеть следующим образом.Define-ы.
Конечный код инициализации будет выглядеть следующим образом.Define-ы.// Маски бит портов клавиш. #define DOWN_MSK (1<<1) // PORTE #define SELECT_MSK (1<<2) // PORTC #define LEFT_MSK (1<<3) // PORTE #define UP_MSK (1<<5) // PORTB #define RIGHT_MSK (1<<6) // PORTB #define PWRMAX_UP_MSK (3<<2*5)// PORTB #define PWRMAX_RIGHT_MSK (3<<2*6) #define PWRMAX_SELECT_MSK (3<<2*2)// PORTC. #define PWRMAX_DOWN_MSK (3<<2*1)// PORTE. #define PWRMAX_LEFT_MSK (3<<2*3)
Сама функция настройки.
// Инициализация пинов на портах B, C, E для работы с кнопками навигации, // установленными на плате. // Подключение кнопок описано в inc файле. void initPinForButton (void) { MDR_RST_CLK->PER_CLOCK |= RST_CLK_PCLK_PORTB|RST_CLK_PCLK_PORTC|RST_CLK_PCLK_PORTE; // Включаем тактирование портов B, C, E. MDR_PORTB->OE &= ~((uint32_t)(UP_MSK|RIGHT_MSK)); // Входы. MDR_PORTB->FUNC &= ~((uint32_t)(UP_MSK|RIGHT_MSK)); // Режим работы - порт. MDR_PORTB->ANALOG |= UP_MSK|RIGHT_MSK; // Цифровые. MDR_PORTB->PULL &= ~((uint32_t)(UP_MSK|RIGHT_MSK|UP_MSK<<16|RIGHT_MSK<<16)); // Подтяжка отключена. MDR_PORTB->PD &= ~((uint32_t)(UP_MSK|RIGHT_MSK|UP_MSK<<16|RIGHT_MSK<<16)); // Триггер Шмитта выключен гистерезис 200 мВ // Управляемый драйвер. MDR_PORTB->PWR |= PWRMAX_UP_MSK|PWRMAX_RIGHT_MSK; // Максимальная скорость обоих выводов. MDR_PORTB->GFEN |= UP_MSK|RIGHT_MSK; // Фильтр импульсов включен (фильтрация импульсов до 10 нс). MDR_PORTC->OE &= ~((uint32_t)(SELECT_MSK)); // Вход. MDR_PORTC->FUNC &= ~((uint32_t)(SELECT_MSK)); // Режим работы - порт. MDR_PORTC->ANALOG |= SELECT_MSK; // Цифровой. MDR_PORTC->PULL &= ~((uint32_t)(SELECT_MSK|SELECT_MSK<<16)); // Подтяжка отключена. MDR_PORTC->PD &= ~((uint32_t)(SELECT_MSK|SELECT_MSK<<16)); // Триггер Шмитта выключен гистерезис 200 мВ. // Управляемый драйвер. MDR_PORTC->PWR |= PWRMAX_SELECT_MSK; // Максимальная скорость вывода. MDR_PORTC->GFEN |= SELECT_MSK; // Фильтр импульсов включен (фильтрация импульсов до 10 нс). MDR_PORTE->OE &= ~((uint32_t)(DOWN_MSK|LEFT_MSK)); // Входы. MDR_PORTE->FUNC &= ~((uint32_t)(DOWN_MSK|LEFT_MSK)); // Режим работы - порт. MDR_PORTE->ANALOG |= DOWN_MSK|LEFT_MSK; // Цифровые. MDR_PORTE->PULL &= ~((uint32_t)(DOWN_MSK|LEFT_MSK|DOWN_MSK<<16|LEFT_MSK<<16)); // Подтяжка отключена. MDR_PORTE->PD &= ~((uint32_t)(DOWN_MSK|LEFT_MSK|DOWN_MSK<<16|LEFT_MSK<<16)); // Триггер Шмитта выключен гистерезис 200 мВ. // Управляемый драйвер. MDR_PORTE->PWR |= PWRMAX_DOWN_MSK|PWRMAX_LEFT_MSK; // Максимальная скорость обоих выводов. MDR_PORTE->GFEN |= DOWN_MSK|LEFT_MSK; // Фильтр импульсов включен (фильтрация импульсов до 10 нс). } - Так как все таймеры имеют одинаковую структуру, то настройка второго таймера до определенного момента будет идентична настройки предыдущего. Так же создадим функцию, которая будет инициализировать таймер. У меня она выглядит так.
// Настройка таймера для генерации прерываний 25 раз в секунду. void initTimerButtonCheck (void) { } - Далее все как в первом таймере, только ARR не 125 (пол секунды), а 10 (1/25-я).Заполнение регистров.
MDR_RST_CLK->PER_CLOCK |= RST_CLK_PCLK_TIMER2; // Включаем тактирование таймера 2. MDR_RST_CLK->TIM_CLOCK |= RST_CLK_TIM_CLOCK_TIM2_CLK_EN; // Подаем тактирование без пред делителя. MDR_TIMER2->CNT = 0;// Считай с 0. MDR_TIMER2->PSG = 32000-1; // На таймер идет частота TIM_CLK/32000. MDR_TIMER2->ARR = 10; // 1 секунда 250 тиков. У нас 25 опросов в секунду => 250/25=10. - Далее нам нужно, чтобы при совпадении CNT и ARR у нас происходило прерывание. Для этого нам нужен регистр IE. Из всего многообразия различных случаев, вызывающих прерывание, нам нужен самый простой: CNT_ARR_EVENT_IE. IE


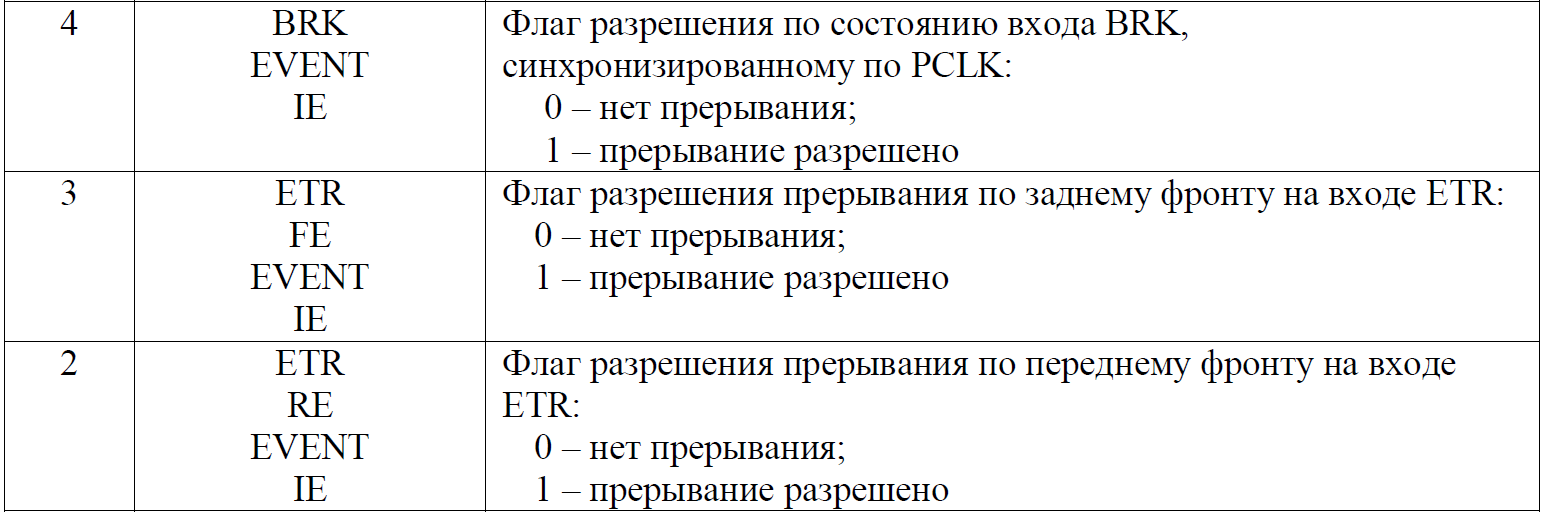

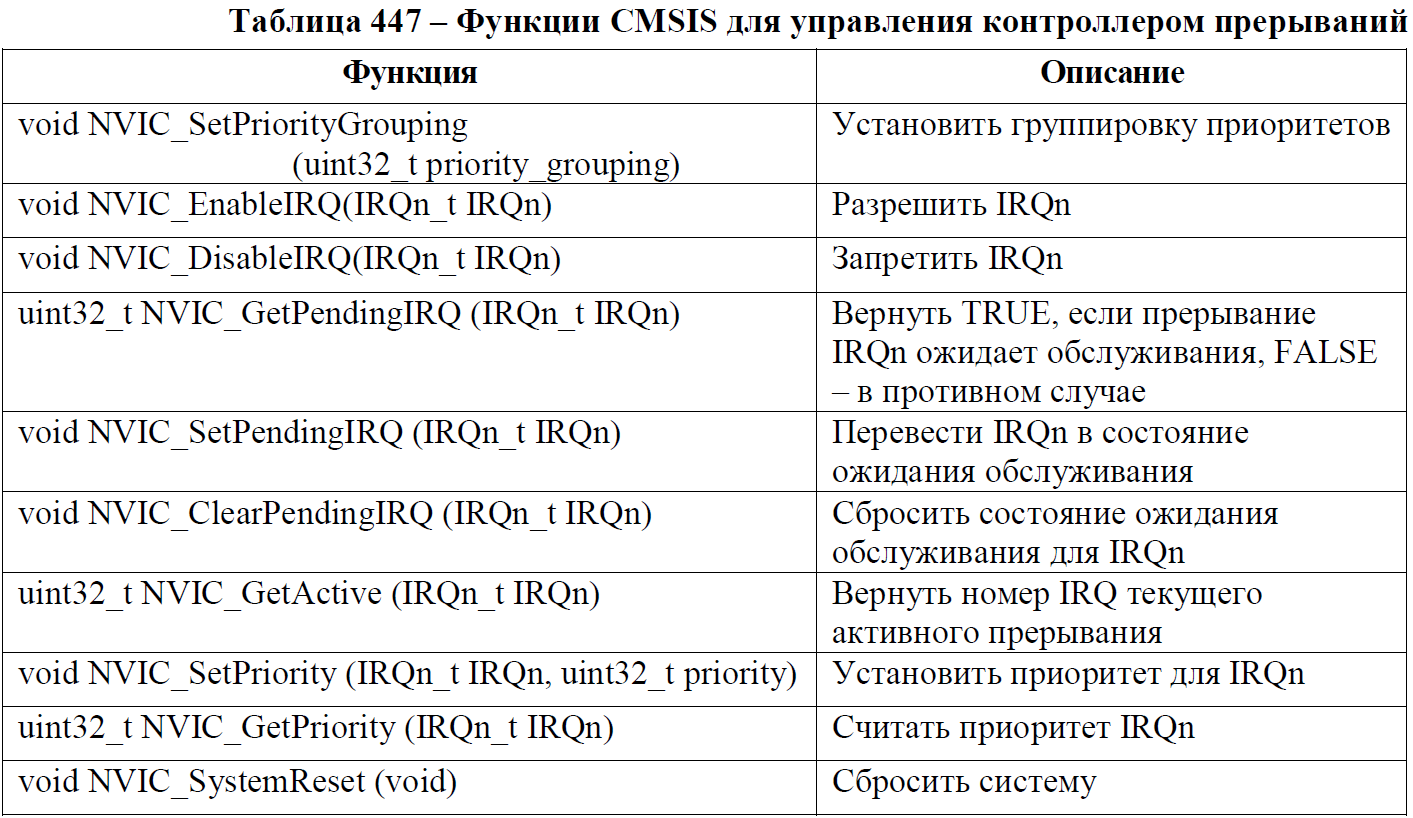
MDR_TIMER2->IE = TIMER_IE_CNT_ARR_EVENT_IE; // Разрешаем прерывание по совпадению CNT и ARR. - Теперь при CNT == ARR у нас возникает прерывание. Но оно нам ничего не даст, потому что по умолчанию прерывания от всего таймера запрещены. Исправить это можно, разрешив прерывание от всего таймера в контроллере NVIC. В предыдущих статьях мы уже имели с ним дело. Но тогда мы промелькнули его вскользь. Для того, чтобы разрешить или запретить прерывания — в CMSIS есть собственные функции. Бояться их не стоит, ибо они представляют из себя простые макросы в одну СИ-команду. Но они здорово улучают читабельность кода.Вот какие команды CMSIS мы можем использовать.Отсюда нам нужна функция NVIC_EnableIRQ.
 Ее параметр можно узнать из таблицы в файле MDR32Fx.h
Ее параметр можно узнать из таблицы в файле MDR32Fx.h/* MDR32Fx Interrupt Number Definition */ typedef enum IRQn { /*---- Cortex-M3 Processor Exceptions Numbers --------------------------------*/ NonMaskableInt_IRQn = -14, /*!< 2 Non Maskable Interrupt *///!< NonMaskableInt_IRQn HardFault_IRQn = -13, /*!< 3 Hard Fault Interrupt *///!< HardFault_IRQn MemoryManagement_IRQn = -12, /*!< 4 Memory Management Interrupt *///!< MemoryManagement_IRQn BusFault_IRQn = -11, /*!< 5 Bus Fault Interrupt *///!< BusFault_IRQn UsageFault_IRQn = -10, /*!< 6 Usage Fault Interrupt *///!< UsageFault_IRQn SVCall_IRQn = -5, /*!< 11 SV Call Interrupt *///!< SVCall_IRQn PendSV_IRQn = -2, /*!< 14 Pend SV Interrupt *///!< PendSV_IRQn SysTick_IRQn = -1, /*!< 15 System Tick Timer Interrupt *///!< SysTick_IRQn /*---- MDR32Fx specific Interrupt Numbers ------------------------------------*/ CAN1_IRQn = 0, /*!< CAN1 Interrupt *///!< CAN1_IRQn CAN2_IRQn = 1, /*!< CAN1 Interrupt *///!< CAN2_IRQn USB_IRQn = 2, /*!< USB Host Interrupt *///!< USB_IRQn DMA_IRQn = 5, /*!< DMA Interrupt *///!< DMA_IRQn UART1_IRQn = 6, /*!< UART1 Interrupt *///!< UART1_IRQn UART2_IRQn = 7, /*!< UART2 Interrupt *///!< UART2_IRQn SSP1_IRQn = 8, /*!< SSP1 Interrupt *///!< SSP1_IRQn I2C_IRQn = 10, /*!< I2C Interrupt *///!< I2C_IRQn POWER_IRQn = 11, /*!< POWER Detecor Interrupt *///!< POWER_IRQn WWDG_IRQn = 12, /*!< Window Watchdog Interrupt *///!< WWDG_IRQn Timer1_IRQn = 14, /*!< Timer1 Interrupt *///!< Timer1_IRQn Timer2_IRQn = 15, /*!< Timer2 Interrupt *///!< Timer2_IRQn Timer3_IRQn = 16, /*!< Timer3 Interrupt *///!< Timer3_IRQn ADC_IRQn = 17, /*!< ADC Interrupt *///!< ADC_IRQn COMPARATOR_IRQn = 19, /*!< COMPARATOR Interrupt *///!< COMPARATOR_IRQn SSP2_IRQn = 20, /*!< SSP2 Interrupt *///!< SSP2_IRQn BACKUP_IRQn = 27, /*!< BACKUP Interrupt *///!< BACKUP_IRQn EXT_INT1_IRQn = 28, /*!< EXT_INT1 Interrupt *///!< EXT_INT1_IRQn EXT_INT2_IRQn = 29, /*!< EXT_INT2 Interrupt *///!< EXT_INT2_IRQn EXT_INT3_IRQn = 30, /*!< EXT_INT3 Interrupt *///!< EXT_INT3_IRQn EXT_INT4_IRQn = 31 /*!< EXT_INT4 Interrupt *///!< EXT_INT4_IRQn }IRQn_Type;
Нам нужен второй таймер. Следовательно наша функция будет выглядеть так.NVIC_EnableIRQ(Timer2_IRQn); // Разрешаем прерывание от таймера в целом. - Осталось только включить таймер и наша конечная функция будет иметь следующий вид.Инициализация таймера 2 для опроса кнопок.// Настройка таймера для генерации прерываний 25 раз в секунду.
void initTimerButtonCheck (void)
{
MDR_RST_CLK->PER_CLOCK |= RST_CLK_PCLK_TIMER2; // Включаем тактирование таймера 2.
MDR_RST_CLK->TIM_CLOCK |= RST_CLK_TIM_CLOCK_TIM2_CLK_EN; // Подаем тактирование без предделителя.
MDR_TIMER2->CNT = 0; // Считай с 0.
MDR_TIMER2->PSG = 32000-1; // На таймер идет частота TIM_CLK/32000.
MDR_TIMER2->ARR = 10; // 1 секунда 250 тиков. У нас 25 опросов в секунду => 250/25=10.
MDR_TIMER2->IE = TIMER_IE_CNT_ARR_EVENT_IE; // Разрешаем прерывание по совподению CNT и ARR.
NVIC_EnableIRQ(Timer2_IRQn); // Разрешаем прерывание от таймера в целом.
MDR_TIMER2->CNTRL = TIMER_CNTRL_CNT_EN; // Включаем таймер.
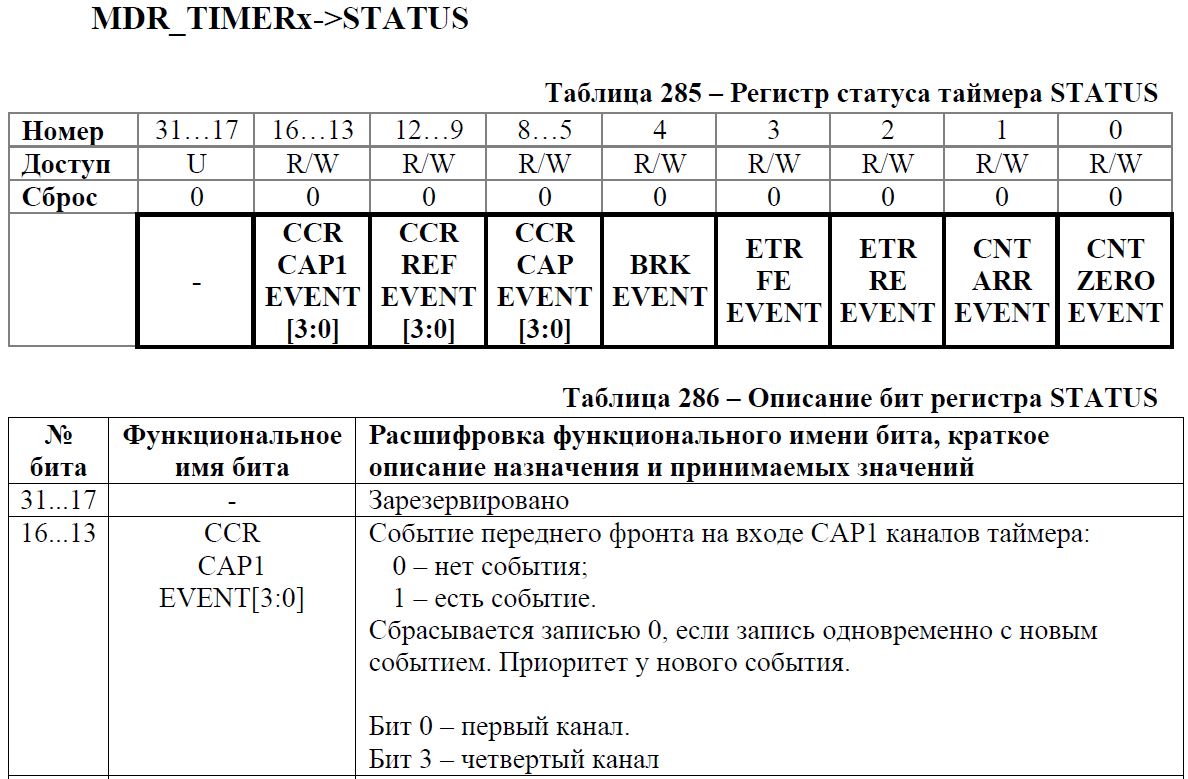
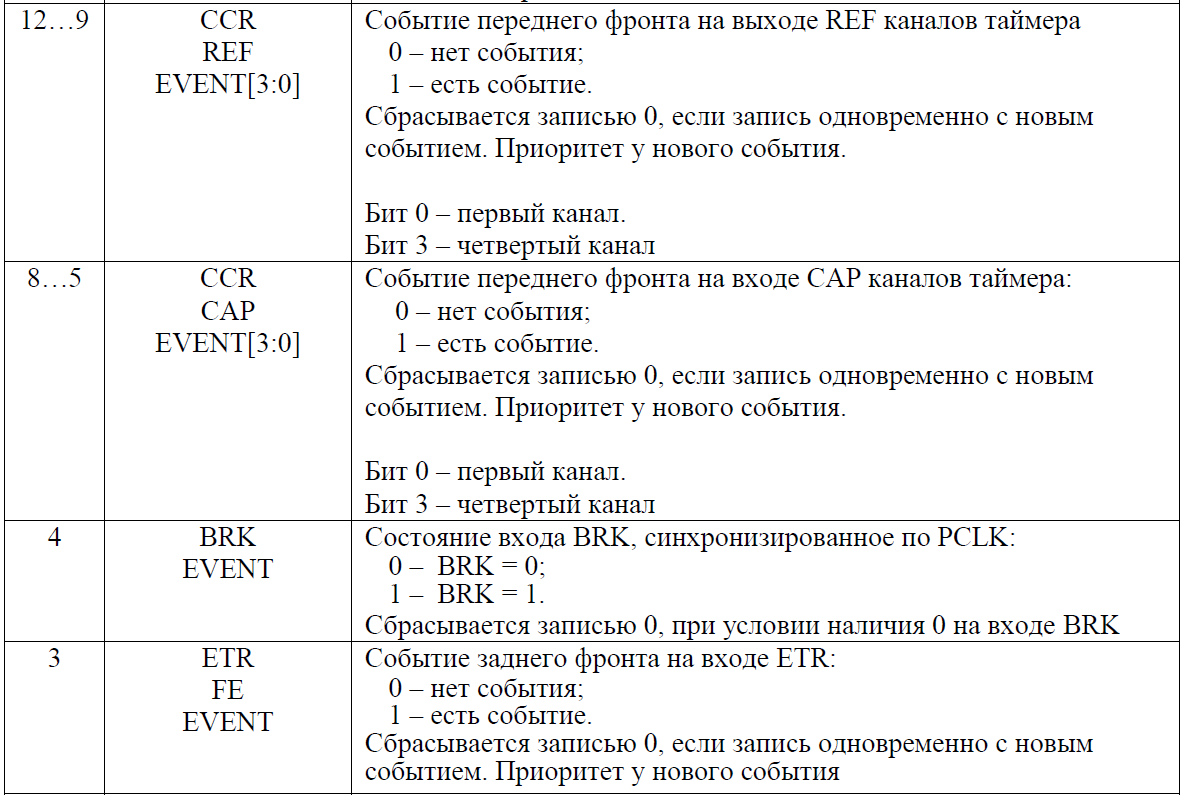
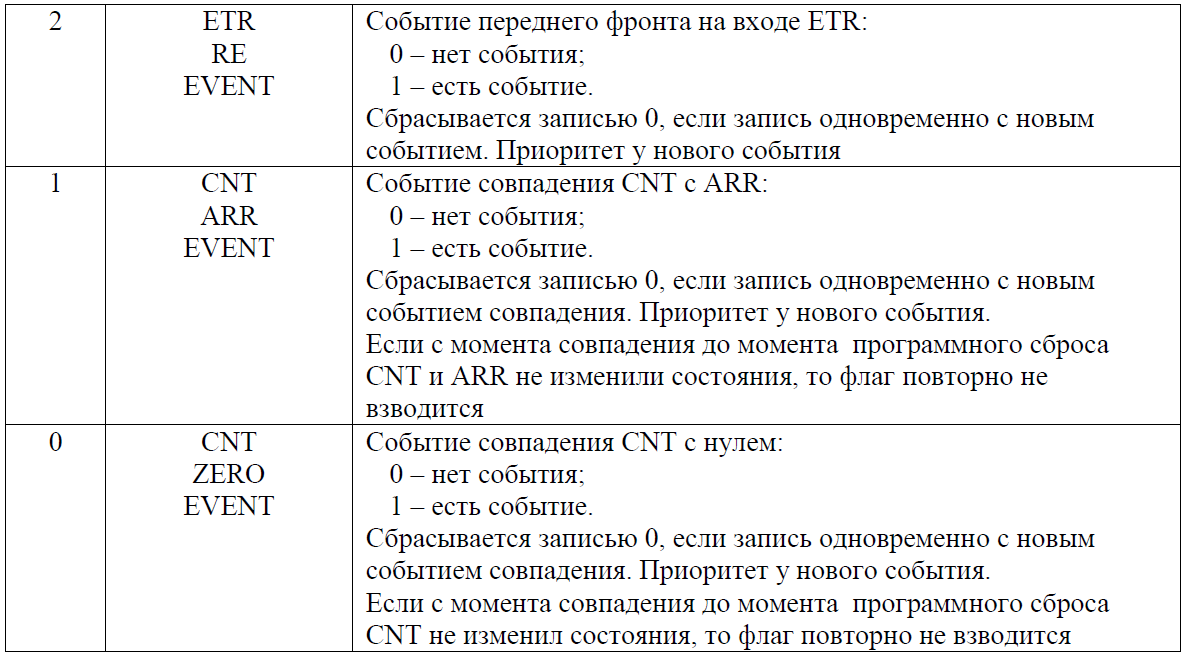
} - Теперь нам нужно создать обработчик прерывания. Его имя строго фиксировано в файле startup_MDR32F9Qx.s. На весь таймер есть всего один вектор прерывания. Все названия там интуитивно понятны. Наш называется Timer2_IRQHandler. Создадим функцию с пустыми входными параметрами. И первой же командой нужно сбросить флаг прерывания, из-за которого мы сюда попали. Иначе после выхода из прерывания мы попадем обратно в его начало. Сбрасывать флаг в конце так же нельзя, ибо не хватает времени, чтобы он был «полностью сброшен» и в итоге мы все равно попадаем в прерывание с несброшенным флагом. Обязательно нужно, чтобы перед выходом из прерывания была хотя бы одна команда, разделяющая сброс флага и выходом из прерывания. Сбросить флаг можно в регистре STATUS. STATUSТак как у нас всего одно событие из таймера используется, то мы можем смело записывать «0» во весь регистр. Если бы у на было несколько событий, то мы должны были бы сначала проверить, какое из событий произошло. В нашем случае функция будет иметь следующий вид.
void Timer2_IRQHandler (void) { MDR_TIMER2->STATUS = 0; // Сбрасываем флаг. Обязательно первой коммандой. // Здесь обязательно должна быть хоть одна команда. } - В самом начале статьи мы определились, что при входе в прерывание мы будем менять состояние светодиода, чтобы показать, что прерывание было обработано. Для этого нам нужно воспользоваться одним из двух пользовательских светодиодов, подключенных к выводам PC0 и PC1. Подключение светодиодов.Предлагаю для этой цели использовать PC0 (на плате он слева). А светодиод, подключенные к PC1 нужно отключить от выхода микроконтроллера и проводом подключить к PA1 (нашему выводу ШИМ).
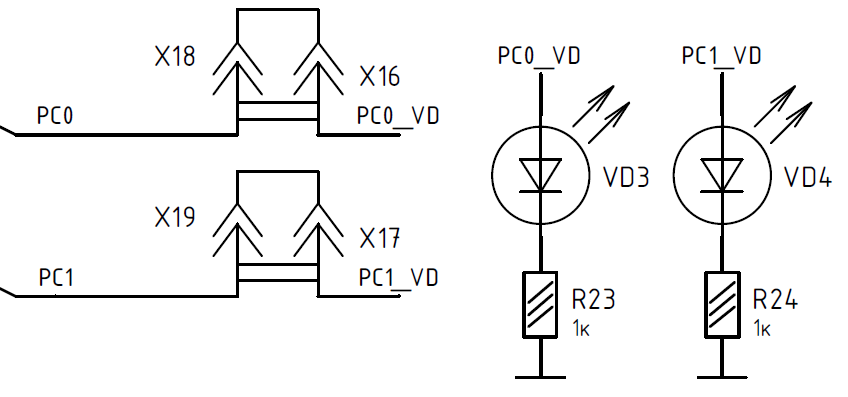 Инициализация светодиодов будет выглядеть следующим образом.Функция настраивает оба светодиода, но т.к. второй отключен (перемычкой), то никакой разницы не будет.
Инициализация светодиодов будет выглядеть следующим образом.Функция настраивает оба светодиода, но т.к. второй отключен (перемычкой), то никакой разницы не будет.// Подключение светодиодов. #define LED0 (1<<0) // PORTC. #define LED1 (1<<1) // PORTC. #define PWRMAX_LED0 (3<<2*0) // Максимальная скорость работы порта. #define PWRMAX_LED1 (3<<2*1) // Инициализация порта C для работы с двумя светодиодами. void initPinPortCForLed (void) { MDR_RST_CLK->PER_CLOCK |= RST_CLK_PCLK_PORTC; // Включаем тактирование портов C. MDR_PORTC->OE |= LED0|LED1; // Выход. MDR_PORTC->FUNC &= ~((uint32_t)(LED0|LED1)); // Режим работы - порт. MDR_PORTC->ANALOG |= LED0|LED1; // Цифровые. MDR_PORTC->PULL &= ~((uint32_t)(LED0|LED1|LED0<<16|LED1<<16)); // Подтяжка отключена. MDR_PORTC->PD &= ~((uint32_t)(LED0|LED1|LED0<<16|LED1<<16)); // Триггер Шмитта выключен гистерезис 200 мВ. // Управляемый драйвер. MDR_PORTC->PWR |= PWRMAX_LED0|PWRMAX_LED1; // Максимальная скорость пин обоих светодиодов. MDR_PORTC->GFEN &= ~((uint32_t)(LED0|LED1)); // Фильтрация импульсов отключена. } - Осталось только опросить клавиши и изменить значение в ARR таймера ШИМ. Но наши кнопки подключены к 3-м разным портам. Можно, конечно, по-старинке. Брать значения с целого порта и с помощью маски смотреть конкретные выводы, но в этом случае намного удобнее использовать BitBanding. Если не углубляться в подробности, то у нас каждый бит области периферии (порты ввода-вывода в том числе) имеет свою собственную 32-х битную ячейку. В которой записано либо «1» либо «0». В зависимости от состояния бита. С ними можно работать как с обыкновенными регистрами. Запись «1» даст 1 в нужном бите реального регистра. «0» — соответственно, 0. Для того, чтобы получить адреса этих ячеек, можно воспользоваться очень удобным калькулятором Catethysis-а. Разберем на примере. У нас клавиша UP подключена к выводу 5 порта B. Идем в документацию и смотрим адрес регистра порта B. Там находимВбиваем этот адрес в поле «регистр», а в поле «бит» пишем 5. На выходе получаем 0x43600014. Именно работая с ячейкой по этому адресу мы работаем с битом 5 порта B. Но просто записать 0x43600014 = 1 — нельзя. А вот *(uint32_t*)0x43600014 = 1 — можно.
 Теперь, подобным образом можно переписать все выводы, подключенные к кнопкам.Точно так же можно сделать и для светодиода.
Теперь, подобным образом можно переписать все выводы, подключенные к кнопкам.Точно так же можно сделать и для светодиода.// Читать состояние клавиши. #define DOWN_FLAG *(uint32_t*)0x43900004 #define SELECT_FLAG *(uint32_t*)0x43700008 #define LEFT_FLAG *(uint32_t*)0x4390000c #define UP_FLAG *(uint32_t*)0x43600014 #define RIGHT_FLAG *(uint32_t*)0x43600018#define LED0_FLAG *(uint32_t*)0x43700000 - Теперь осталось лишь записать опрос кнопок и изменение регистра ARR таймера 1.Итоговая функция будет выглядеть так.int PWM_speed = 125;
void Timer2_IRQHandler (void)
{
MDR_TIMER2->STATUS = 0; // Сбрасываем флаг. Обязательно первой командой.
LED1_FLAG = !LED1_FLAG; // Показываем, что прерывание было обработано.
if (UP_FLAG == 0) PWM_speed--; // Проверяем, нажата ли какая-нибудь клавиша. Если нажата — что-то делаем с частотой.
else if (DOWN_FLAG == 0) PWM_speed++;
else if (LEFT_FLAG == 0) PWM_speed--;
else if (RIGHT_FLAG == 0) PWM_speed++;
if (PWM_speed < 1) PWM_speed = 1; // Проверяем, чтобы частота не вышла за пределы диапазона от 250 Гц до 0.5 Гц.
else if (PWM_speed > 500) PWM_speed = 500;
MDR_TIMER1->ARR = PWM_speed; // Меняем частоту.
} - Основная функция main содержит в себе лишь перечисление всех выше описанных функций. Выглядит так.int main (void)
{
initTimerPWMled(PWM_speed); // Запускаем ШИМ. Параметр — скорость ШИМ.
initPinForButton(); // Настраиваем кнопки.
initPinPortCForLed(); // Работа светодиода (клавиша считывается).
initTimerButtonCheck(); // Инициализация таймера.
while (1)
{
}
}
Вместо заключения
В этой статье мы рассмотрели реализацию поставленной задачи без использования библиотеки SPL. В следующей статье мы реализуем ту же задачу, но уже с использованием только лишь SPL и сравним результаты.
Итоговый проект на github
Небольшое дополнение
В данный момент Миландр выпустил новую, переработанную версию SPL. К сожалению, пока не в виде полноценной версии. В текущей версии нельзя смотреть состояние регистров в окнах keil. Но уже скоро выйдет полная версия и этот недостаток будет исправлен. Для тех, кто хочет попробовать новую версию — вот ссылка на чистый проект.
Список предыдущих статей.
- 1. Переходим с STM32F103 на К1986ВЕ92QI. Или первое знакомство с российским микроконтроллером.
- 2. Переходим с STM32 на российский микроконтроллер К1986ВЕ92QI. Настройка проекта в keil и мигание светодиодом.
- 3. Переходим с STM32 на российский микроконтроллер К1986ВЕ92QI. Системный таймер (SysTick).
- 4. Переходим с STM32 на российский микроконтроллер К1986ВЕ92QI. Настройка тактовой частоты.
- 5. Переходим с STM32 на российский микроконтроллер К1986ВЕ92QI. Практическое применение: Генерируем и воспроизводим звук. Часть первая: генерируем прямоугольный и синусоидальный сигнал. Освоение ЦАП (DAC).
- 6. Переходим с STM32 на российский микроконтроллер К1986ВЕ92QI. Практическое применение: Генерируем и воспроизводим звук. Часть вторая: генерируем синусоидальный сигнал. Освоение DMA.
- 7. Переходим с STM32 на российский микроконтроллер К1986ВЕ92QI. Практическое применение: Генерируем и воспроизводим звук. Часть третья: генерируем синусоидальный сигнал. Простой взгляд на DMA + первое знакомство с таймерами.
- 8. Переходим с STM32 на российский микроконтроллер К1986ВЕ92QI. Практическое применение: Генерируем и воспроизводим звук. Часть четвертая: создаем цифровую часть одноголосной и многоголосой музыкальной открытки.
