В этом учебном руководстве демонстрируется управление контактами GPIO на простом примере, аналогичном написанию простейшей программы «Hello World»: путем настройки платы UP так, чтобы можно было мигать внешним светодиодом.

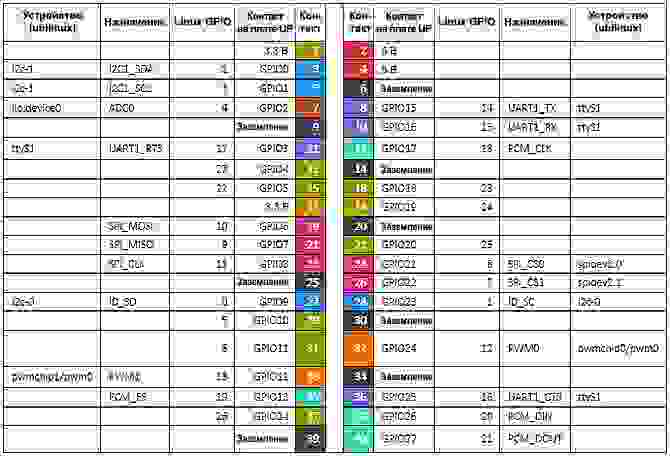
Комплект Intel RealSense Robotics Development Kit (RDK) состоит из камеры глубины Intel RealSense R200 и платы Aaeon* UP. Плата UP в этой системе является вычислительным ядром. Для подключения внешних устройств эта плата оборудована 40-контактной клеммой ввода-вывода, показанной на рисунке выше. На плате UP размещено в общей сложности 28 независимых контактов GPIO, выведенных на клемму ввода-вывода. Для платы UP разработаны драйверы платформы ядра Ubuntu 14.04, обеспечивающие нумерацию контактов GPIO в Linux в диапазоне от 0 до 27 с эмуляцией возможностей платы Raspberry Pi.
Доступ к аппаратным GPIO в этом учебном руководстве будет осуществляться на низком уровне с помощью Linux sysfs. При помощи Sysfs пользователи Linux (или код в пользовательском пространстве) могут взаимодействовать с устройствами на уровне системы (ядра).
Для этого учебного руководства не нужны никакие особые библиотеки, поскольку используется интерфейс sysfs.
Важно! Обратите внимание, что номера Linux GPIO на рис. 1 отличаются и от номеров физических контактов, и от разводки на плате UP. Номера Linux GPIO назначаются в соответствии со схемой нумерации GPIO Raspberry Pi BCM.
Для сравнения с разводкой на плате Raspberry Pi посетите сайт.
Достаточно настроить плату UP в составе RDK согласно руководству по быстрому запуску From Zero to Hero: Getting up and running with the Intel RealSense Robotic Development Kit, и все готово для работы над первым настоящим проектом. Мы будем управлять включением светодиода с помощью языка программирования C и контактов GPIO на плате UP.
Вы соберете простейшую электрическую схему и подключите ее к контактам GPIO платы UP.
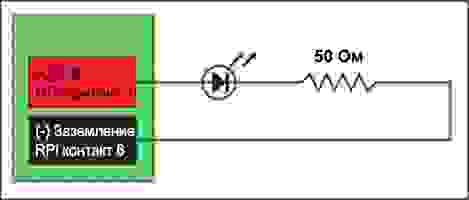
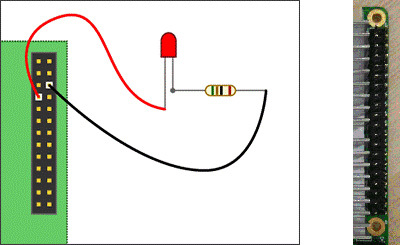
Перед написанием кода следует ознакомиться с нумерацией контактов на плате UP и собрать простую электрическую цепь. Для начала мы просто включим светодиод, используя контакт 3,3 В и контакт заземления на плате UP. Схема нашей электрической цепи такова:
Перед началом работы отключите плату UP. Если работать с ней во включенном состоянии, существует риск короткого замыкания, а этого следует избегать, особенно если учесть, что это наш первый проект.
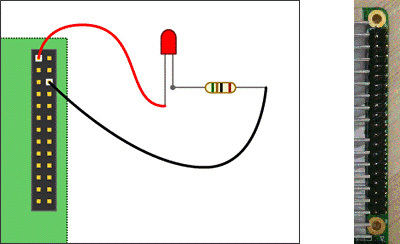
Еще раз проверьте, как все подключено. Когда все будет готово, электрическая цепь должна выглядеть так:
Включите плату UP. Светодиод должен сразу же загореться.
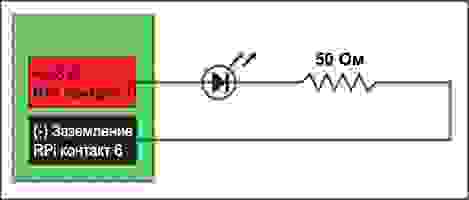
Итак, простейшая электрическая цепь проверена, теперь пора переключить положительный провод с постоянно включенного контакта 3,3 В на один из программируемых контактов GPIO. Вот как будет выглядеть схема:
Когда все будет готово, электрическая цепь должна выглядеть так:
Приведенный ниже пример исходного кода заставит светодиод мигать.
Если файл с исходным кодом называется blink.c, можно скомпилировать код с помощью следующей команды:
В этом учебном руководстве по работе с платой UP создается простейшая электрическая схема; плата UP и программа на языке C, использующая механизм Linux sysfs, управляют работой светодиода, который должен мигнуть 10 раз.
В следующем учебном руководстве в этой серии мы будем регулировать яркость светодиода с помощью данных глубины, поступающих от камеры R200 и межплатформенного API Intel RealSense, для чего нам придется несколько переработать и электрическую съему, и программу на C.


Плата UP в составе Robotics Development Kit
Комплект Intel RealSense Robotics Development Kit (RDK) состоит из камеры глубины Intel RealSense R200 и платы Aaeon* UP. Плата UP в этой системе является вычислительным ядром. Для подключения внешних устройств эта плата оборудована 40-контактной клеммой ввода-вывода, показанной на рисунке выше. На плате UP размещено в общей сложности 28 независимых контактов GPIO, выведенных на клемму ввода-вывода. Для платы UP разработаны драйверы платформы ядра Ubuntu 14.04, обеспечивающие нумерацию контактов GPIO в Linux в диапазоне от 0 до 27 с эмуляцией возможностей платы Raspberry Pi.
Доступ к аппаратным GPIO в этом учебном руководстве будет осуществляться на низком уровне с помощью Linux sysfs. При помощи Sysfs пользователи Linux (или код в пользовательском пространстве) могут взаимодействовать с устройствами на уровне системы (ядра).
Для этого учебного руководства не нужны никакие особые библиотеки, поскольку используется интерфейс sysfs.
Важно! Обратите внимание, что номера Linux GPIO на рис. 1 отличаются и от номеров физических контактов, и от разводки на плате UP. Номера Linux GPIO назначаются в соответствии со схемой нумерации GPIO Raspberry Pi BCM.
Для сравнения с разводкой на плате Raspberry Pi посетите сайт.
Как зажечь светодиод с помощью платы UP
Достаточно настроить плату UP в составе RDK согласно руководству по быстрому запуску From Zero to Hero: Getting up and running with the Intel RealSense Robotic Development Kit, и все готово для работы над первым настоящим проектом. Мы будем управлять включением светодиода с помощью языка программирования C и контактов GPIO на плате UP.
Что вы узнаете
Вы соберете простейшую электрическую схему и подключите ее к контактам GPIO платы UP.
Что понадобится
- 1 небольшой светодиод любого цвета.
- 1 резистор на 50 Ом.
- Одножильный провод небольшого сечения.
- Макетные зажимы или зажимы типа «крокодил» (или и те, и другие) для фиксации контактов.
Да будет свет!
Перед написанием кода следует ознакомиться с нумерацией контактов на плате UP и собрать простую электрическую цепь. Для начала мы просто включим светодиод, используя контакт 3,3 В и контакт заземления на плате UP. Схема нашей электрической цепи такова:

Перед началом работы отключите плату UP. Если работать с ней во включенном состоянии, существует риск короткого замыкания, а этого следует избегать, особенно если учесть, что это наш первый проект.
- Исходя из наличных деталей, соберите электрическую цепь либо на монтажной плате, либо с помощью зажимов-«крокодилов».
- Контакт 1 (+3,3 В) должен быть подключен к длинной ножке светодиода (анод). Этот контакт подает напряжение 3,3 В. В отличие от контактов GPIO на плате UP этот контакт не является программируемым: невозможно им управлять с помощью программного обеспечения.
- Подключите короткую ножку светодиода к резистору. Затем подключите второй контакт резистора к контакту 6 (заземление) на плате UP.
Еще раз проверьте, как все подключено. Когда все будет готово, электрическая цепь должна выглядеть так:

Включите плату UP. Светодиод должен сразу же загореться.
Управление светодиодом с помощью программного кода
Итак, простейшая электрическая цепь проверена, теперь пора переключить положительный провод с постоянно включенного контакта 3,3 В на один из программируемых контактов GPIO. Вот как будет выглядеть схема:

- Снова выключите плату UP перед тем, как менять что-либо в подключениях.
- Перенесите положительный провод с контакта 1 на контакт 7.
Когда все будет готово, электрическая цепь должна выглядеть так:

Исходный код для управления миганием
Приведенный ниже пример исходного кода заставит светодиод мигать.
Исходный код
#include <sys/stat.h>
#include <sys/types.h>
#include <fcntl.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#define IN 0
#define OUT 1
#define LOW 0
#define HIGH 1
#define PIN 24 /* physical pin 18 */
#define POUT 4 /* physical pin 7 */
static int GPIOExport(int pin);
static int GPIOUnexport(int pin);
static int GPIODirection(int pin, int dir);
static int GPIORead(int pin);
static int GPIOWrite(int pin, int value);
int main(int argc, char *argv[])
{
int repeat = 9;
/*
* Enable GPIO pins
*/
if (-1 == GPIOExport(POUT) || -1 == GPIOExport(PIN))
return(1);
/*
* Set GPIO directions
*/
if (-1 == GPIODirection(POUT, OUT) || -1 == GPIODirection(PIN, IN))
return(2);
do {
/*
* Write GPIO value
*/
if (-1 == GPIOWrite(POUT, repeat % 2))
return(3);
/*
* Read GPIO value
*/
printf("I'm reading %d in GPIO %d\n", GPIORead(PIN), PIN);
usleep(500 * 1000);
}
while (repeat--);
/*
* Disable GPIO pins
*/
if (-1 == GPIOUnexport(POUT) || -1 == GPIOUnexport(PIN))
return(4);
return(0);
}
Int GPIOExport(int pin)
{
#define BUFFER_MAX 3
char buffer[BUFFER_MAX];
ssize_t bytes_written;
int fd;
fd = open("/sys/class/gpio/export", O_WRONLY);
if (-1 == fd) {
fprintf(stderr, "Failed to open export for writing!\n");
return(-1);
}
bytes_written = snprintf(buffer, BUFFER_MAX, "%d", pin);
write(fd, buffer, bytes_written);
close(fd);
return(0);
}
Int GPIOUnexport(int pin)
{
char buffer[BUFFER_MAX];
ssize_t bytes_written;
int fd;
fd = open("/sys/class/gpio/unexport", O_WRONLY);
if (-1 == fd) {
fprintf(stderr, "Failed to open unexport for writing!\n");
return(-1);
}
bytes_written = snprintf(buffer, BUFFER_MAX, "%d", pin);
write(fd, buffer, bytes_written);
close(fd);
return(0);
}
Int GPIODirection(int pin, int dir)
{
static const char s_directions_str[] = "in\0out";
#define DIRECTION_MAX 35
char path[DIRECTION_MAX];
int fd;
snprintf(path, DIRECTION_MAX, "/sys/class/gpio/gpio%d/direction", pin);
fd = open(path, O_WRONLY);
if (-1 == fd) {
fprintf(stderr, "Failed to open gpio direction for writing!\n");
return(-1);
}
if (-1 == write(fd, &s_directions_str[IN == dir ? 0 : 3], IN == dir ? 2 : 3)) {
fprintf(stderr, "Failed to set direction!\n");
return(-1);
}
close(fd);
return(0);
}
Int GPIORead(int pin)
{
#define VALUE_MAX 30
char path[VALUE_MAX];
char value_str[3];
int fd;
snprintf(path, VALUE_MAX, "/sys/class/gpio/gpio%d/value", pin);
fd = open(path, O_RDONLY);
if (-1 == fd) {
fprintf(stderr, "Failed to open gpio value for reading!\n");
return(-1);
}
if (-1 == read(fd, value_str, 3)) {
fprintf(stderr, "Failed to read value!\n");
return(-1);
}
close(fd);
return(atoi(value_str));
}
Int GPIOWrite(int pin, int value)
{
static const char s_values_str[] = "01";
char path[VALUE_MAX];
int fd;
snprintf(path, VALUE_MAX, "/sys/class/gpio/gpio%d/value", pin);
fd = open(path, O_WRONLY);
if (-1 == fd) {
fprintf(stderr, "Failed to open gpio value for writing!\n");
return(-1);
}
if (1 != write(fd, &s_values_str[LOW == value ? 0 : 1], 1)) {
fprintf(stderr, "Failed to write value!\n");
return(-1);
}
close(fd);
return(0);
}
Если файл с исходным кодом называется blink.c, можно скомпилировать код с помощью следующей команды:
gcc –Wall –o blink blink.c
Заключение
В этом учебном руководстве по работе с платой UP создается простейшая электрическая схема; плата UP и программа на языке C, использующая механизм Linux sysfs, управляют работой светодиода, который должен мигнуть 10 раз.
В следующем учебном руководстве в этой серии мы будем регулировать яркость светодиода с помощью данных глубины, поступающих от камеры R200 и межплатформенного API Intel RealSense, для чего нам придется несколько переработать и электрическую съему, и программу на C.
